|
|
BLUEFISH ZCC - AUTONOMOUS DEVELOPMENT PROGRAMME
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
PROOF OF CONCEPT - Large scale model of the PlanetSolar, the current speed and size record holder for a solar (only) powered boat. This vessel is not autonomous navigation wise (it is crewed), but it is autonomous as to energy for propulsion. In May of 2012 PlanetSolar proved to the world that boats could be powered without diesel fuel, using only energy from nature. With many congratulations to Raphael Domjan and Immo Stroeher for their enormous efforts to advance current thinking.
BLUEFISH DEVELOPMENT PROJECT INDEX A-Z
This is the INDEX page for the development of the BLUEFISH™ autonomous semi-robotic test boats - the enabling technology for clean zero carbon cruisers of the future. Our aim is to develop a vessel that does not require bunker fuel to attain 7-10 knot travel, continuous - to proof of concept.
As the project progresses we will include more pictures - which you can see by clicking on the headings below. If there is no link, then we have not yet reached that stage.
This is a complex programme that may take several years to complete - mostly dependent on funding support and development partners. We are a micro SME with a concept that we believe will have a significant impact on marine transport in years to come. As ever, it all depends on research funding. For example, where we led a consortium of companies and academia looking for support from the Horizon 2020 EU initiatives, we were forced to withdraw, being unable to secure match funds for disruptive technology commercially. Simply put, financial institutions will not fund speculative research. We have no aspirations to produce military vessels, save for wargaming fun at scale level - hence, although 'BLUEFISH' is an advanced vessel project, military backing is also a closed door.
ELIZABETH SWAN - The most likely source of backing for BLUEFISH is from the film industry, where a modified version of the concept is to be used in the making of the Jameson Hunter eco-adventure series, where the hero sails the 'Elizabeth Swan' on many thrill soaked travels, the boat named after Elizabeth Swann played by Keira Knightley in Pirates of the Caribbean.
CONCEPT - Energy from nature is free and abundant, the challenge is to harvest this energy with sufficient efficiency to produce a vessel capable of traveling without dependence on fossil fuels. That is of course nothing new, sailing ships have been doing that for years, but we aim to produce an autonomous ship; one that does not need a crew to harvest natural energy. The harvesting must be automatic, which is where robotics comes into play big time. We aim to harvest light, wind and wave energy in combination.
The basic platform is of a size to carry useful payloads around the world at good speeds. Life support is included for up to six crew, but life support is energy hungry and consumes cargo load that might be used for sensors, ROVs, etc, when used as an autonomous vessel. This is the next generation of zero carbon cruiser, ZCC ocean transportation, that once proven, could evolve into 100-300 meter ZCC cargo and cruise ships.
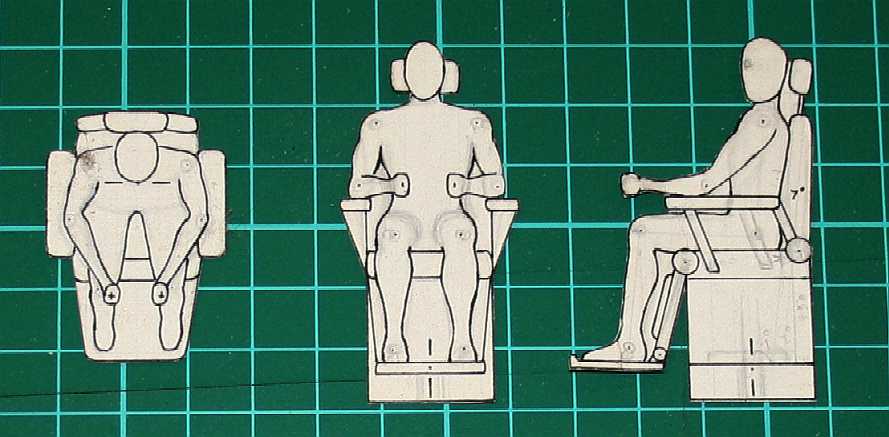
BACK TO BASICS - Although the Bluefish ZCC may be fully autonomous one day, the crewed version still needs to be comfortable for a team of up to six persons long term - and 10-12 people short haul. In an age of computers and CAD, we still find it useful to have cardboard figures to scale, to move them around a model - to be able to visualize the conditions onboard. We find that this stimulates the creative juices and the imagination. The above are 1/20th scale figures seated in a typical helm chair - first used in 1994 - these items were passed to us in a box loaded with treasure in an IP buyout, and they're still going strong. We very nearly threw them away as being obsolete. Never sir!
BASICS - When building a multi-hull model it is important to keep the hulls running true (parallel) to avoid vortex drag. To achieve this it is necessary to construct a jig in which the hulls may be aligned precisely, for which moderate level joinery skills will be required. Fortunately, our in-house boat builder is a highly skilled carpenter. He works to an accuracy of 0.25mm, which in timber works out to 0.5mm in practical terms, because of the saws and materials used - in this case pine and chipboard. This level of accuracy may be improved on using shims and laser sighting - when it comes to welding/assembling the alloy hull components. The Jig is also useful because it keeps the model protected and upright during storage and transit. To complete the package, the Jig may include a lid, lifting eyes and fold down legs - in other words a dedicated, self-contained workbench.
MAKING THE JIG & JIG TOWERS in WOOD (pine, plywood, chipboard) - Click on the picture above to see how a JIG was constructed in timber to ensure accuracy when aligning the hulls and superstructure of the Bluefish ZCC development ASV - and to be certain that 2nd and 3rd development models will be built to the same dimensions. Except only that the hull diameters are interchangeable. The new jig was started in July of 2013.
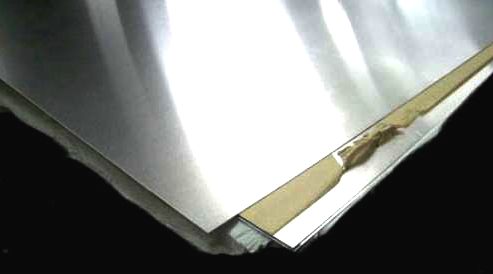
BOAT BUILDING IN ALUMINIUM - Click on the picture above to read more on the fabrication of the aluminium hulls. This stage started on the 18th of August of 2013.
SOLAR ENERGY HARVESTING - A patent system of smart energy harvesting is to be tested on the Bluefish model for efficiency increases, over and above other systems employed on ocean going vehicles currently and experimentally.
WAVE ENERGY HARVESTING - There is much research funded by such organisations as the NOC and DSTL at the moment. We have come up with a completely new way of harvesting wave energy, based on our unique SWASH hull. But we cannot afford the patent, so we're keeping the details to ourselves. The patent system should be changed to stimulate technology innovation and create jobs. Patents should be made affordable to every man in the street - not kept the exclusive domain of the wealthy - a violation of Article 14 the ban on discrimination.
WIND ENERGY HARVESTING - Wind as a vector is the motion of air mass over water. In our case, we view wind as an energy source, rather than a vector, useful for workboats, yachts and military.
DISPLACEMENT CALCULATIONS - On a SWASH ship, calculating displacement and reserve buoyancy is extremely important. The calculations are no less important for a test, or development model. Indeed, one might argue that the exercise is more difficult - where small scale machinery is pro-rata heavier.
AUTONOMOUS ELECTRONICS - The BLUEFISH development model is to feature smaller, lighter, autonomous navigation electronics to conduct a program of simulations for collision avoidance and other functions that the full size vessel will have to deal with on a day to day basis.
The control algorithm reactively plans paths with feedback to the autopilot of the autonomous ship. The system is based on waypoint guidance by line-of-sight allied to known human parameters. Rules 8 and 14 of the COLREGs are applicable to the magnitude of maneuvers in head-on and other scenarios.
The system employs traditional sensors and high definition optical and other range sensors. There is also a close range sensor array to assist with docking and port situations.
AUTONOMOUS DOCKING & PORT APPROACHES - A veritable adventure playground for us to experiment and perfect. It's almost like war gaming, setting up the obstacles and surprises to try to catch out the unwary craft approaching. Nothing can stop a collision in harbour if your vessel is moored - thus the fault elsewhere - but if under power, it should be possible to prevent even the most insensitive pilot from hitting your vessel.
Using a number of radio controlled boats to simulate a busy harbour, the target vessel must enter the port obeying protocol, communicate with the port authority, taking instructions, then moor in specified location - all the while avoiding craft that are not complying with the marine (blue and green water) navigation rules.
R.O.V. CHAMBER - Three models are being constructed to be able to carry out tests in tandem at different facilities. One of the model hulls is bigger to house an ROV, which is designed to be launched and recovered autonomously in rough seas, but in the model will be remotely operated. This system includes an onboard cable reel payout and pull back system.
AWARD WINNING DESIGN - The original concept ship that led to the BlueFish™ and then on to the SeaVax™ design won this "Clean Energy" award in December 2016. Copyright © January 27 2017 Blueplanet Universal Holdings Ltd, all rights reserved. You will need permission from BUHL to reproduce this picture except for educational purposes or review.
VARIABLE DISPLACEMENT & SELF RIGHTING - This model will be able to flood compartments to lower the vessel in the water, in conjunction with mechanical raising and lowering of the outriggers and fore and aft dynamic mass shift. The combination of these actions gives us an extremely active SWASH hull for higher efficiency = reduced drag.
Requires 4 pumps and 3 electro/mechanical actuators.
BATTERIES - The model will not carry batteries for running, only to be able to operate the radio controls and pump functions. Power for running will come directly from the onboard solar cells as seen above. This has been the case in previous development models.
MOTORS - For the model a brush-less high efficiency motor will be used running through a 5:1 reduction gearbox. The full size, proof of concept vessel will be more complex using less expensive dc motors with mechanical switching between ratios to suit the propeller system below.
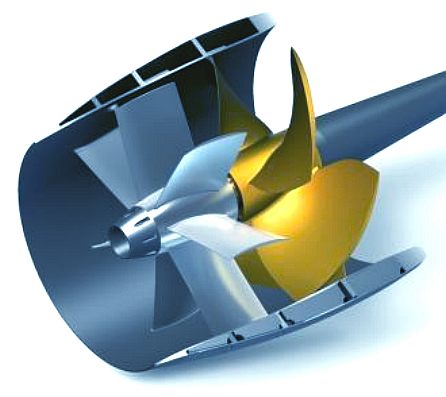
PROPELLER - We will be testing open and Kort type ducted propellers on this model. Submarines and torpedoes use ducted systems with reasonable efficiency. The Voith ducted propeller claims to improve on open propellers and waterjets, to offer low speed cruising and high speed performance, vibration free using a post propulsor stator, whereas, many ships now have pre-propulsor stators.
SUMMARY - This model is a dynamic research test-bed - not just a tow-tank item.
RESEARCH FUNDING - HORIZON 2020 - We put forward a proposal as a SME, rather than an academic institution, which proposal attracted interest from several European partners (15 to include academia). Predictably the rate of funding for such disruptive technology was sufficiently unsympathetic to the commercial risk element to be able to commit substantial resources. We thus had no option but to withdraw from the bid.
The experience not only cost us substantial (wasted) sums as a SME, but confirms that military developers will always have the advantage and newcomers, not in the club as it were, will not be considered for contracts, though their ideas may be plagiarized. Such system ensures overpricing and delays in implementing sustainable change, bolstering procurement fraud that is purported to be widespread.
Oil and plastic pollution totaling some 270,000 tons of waste in five major ocean gyres, is killing life in the oceans and poisoning our food chain. Adapted Bluefish ZCC semi-autonomous SeaVax drones could clean up the oceans for us in just a decade, if funding can be sourced to kickstart such a project. We are not fund raisers, we are though able to construct prototypes in-house to be able to prove concepts, and arrange for subcontractors to build ocean going cleaners that do not add to the carnage, because they are themselves zero emission, solar powered vehicles.
1/20th MODEL COST ESTIMATES INCLUDING IP
Figures for the low level kickstarter project(s), a bare bones costing without assistance from academia or collaborative research.
The model(s) seen on these pages are being constructed under license for hydrodynamic tank tests, self righting tests and open water sea-keeping in line with other models tested - using radio control initially, then switching to computer micro-controller for autonomous robotic control and then as funding allows AI.
The sensor/computer package to be used in this model as "proof of concept" is to be revised to incorporate state of the art marine navionics for ocean going vessels. The development model will be COLREGs compliant.
* SPECIAL SUBSIDY - Hulls made available to students under special subsidy arrangements will be subject to Agreement, said Agreement dependent on the group or individual concerned, and more particularly our interest in the robotic end use envisaged. A guarantor may be required.
Navies may purchase tank test model units from us to verify our results for themselves. These could be available from early 2014, should demand dictate accelerating our development program.
BLUEFISH ZCC : BLUEBIRD MARINE SYSTEMS TEST PROJECT TIMETABLE 2015-16 (1)
Construct tank, solar and wind test models
(2)
Test and collate results in controlled and open conditions
(3) Incorporate any necessary design adjustments
(4) Retest models in tank and open conditions
(5) Incorporate results into final design draft
(6) Construct full size craft
(7) Launch and fit out
(8) Conduct robotic function trials
(9) Conduct navigation test trials
(10) Log harvesting performance in various conditions
WEAPONRY - Inevitably, navies around the world will be looking to see if and how such a vessel design may benefit their operations, useless of course without destructive capability. We will not disappoint them. Suitably equipped, Bluefish ZEV ships can be every bit as effective as nuclear powered warships, but without the contamination risks - that routinely plague our society.
TORPEDOES - The mainstay of war at sea during world wars one and two, is still a weapon that can be cost effective. In the case of the Bluefish ZCC, the hull might well have been designed for inclusion of torpedoes.
SAMs - There is no point having a persistent endurance hull like our ZCCs, and then leave them vulnerable to air attack from drones. Surface (or ship) to air missiles provide an effective solution, while also adding another layer of attack options.
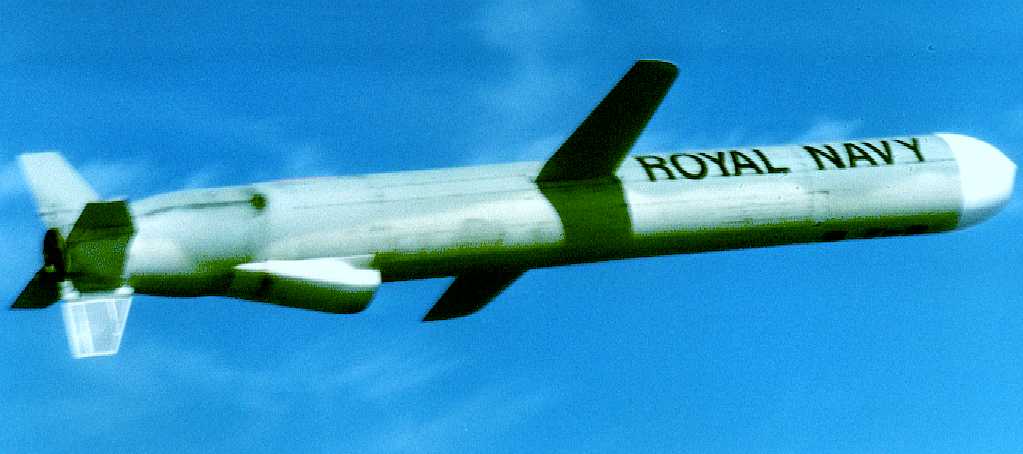
CRUISE - The cruise missile takes a small ship and escalates it to leviathan status in the ability to take out aircraft carriers and other high value naval assets.
ROV MINE COUNTERMEASURES - The ability to detect and clear mines to ensure safe passage to other fleet vessels is yet another string to the Bluefish ZCC's bow. Once again, the unique hull-form might well have been designed for this task.
SEANET PLASTIC OCEAN PATROLS - Oil and plastic pollution totaling some 270,000 tons of waste in five gyres, is killing life in the oceans and that is likely to rebound on us humans by way of a cumulative poisonous food chain. Bluefish ZCC drones adapted to vacuum filter the oceans could clean up the the 5 main gyres for us in just a decade, if funding can be sourced to kickstart a SeaVax project. We're building a model test rig to begin with.
ON CREATIVITY (something we cherish): THE INVENTIVE GENIUS ALBERT EINSTEIN sums up creativity in some of his more famous quotes:
* A person who never made a mistake never tried anything new.
* The true sign of intelligence is not knowledge but imagination.
* If we knew what it was we were doing, it would not be called research, would it?
* True art is characterized by an irresistible urge in the creative artist.
Problem solving in terms of creativity may be thought of as fire fighting. Up to 70% of employees’ time at work is spent fire fighting, which is spending more than 6 hours out of 9 a day grappling with problems that could be eliminated in a perfect world. It's a huge waste of productivity. Imagine what organizations could achieve if thousands of employees could use the wasted 6 hours daily (30 hours weekly) to work on something constructive.
The concept of problem solving in most companies today is flawed. “If it isn't urgent, worry about it later,” is the norm. Eventually, the ignored problem becomes so massive that it calls for – 'fire fighting.' This behavior is so deeply entrenched in most organizations that it has become a culture.
You may be nodding while reading this, but how might the problem be combated?
Below
are 3 quotes from Albert Einstein. These are 3 principles which helped him achieve mammoth levels of
success, and 3 guidelines which can help anyone streamline the way a team
addresses the need to innovate.
BLUEFISH DEVELOPMENT PROJECT INDEX A-Z
TRANSIT EXAMPLES - The above table illustrates one of the most likely ocean awareness expedition routes that could be undertaken by the Elizabeth Swan, showing the time elapsed in days for 7 knots average cruising speed, including times for 5 and 6 knot averages - allowing for 10% downtime and 36 days in ports. Hence, although the objective is to reduce the current solar circumnavigation record from 584 days, the event in not an outright non-stop yacht competition in the offshore racing sense. It remains to be seen how accurate such a prediction might be.
Solar House, BN27 1RF, United Kingdom + 44 (0) 1323 831727 +44 (0) 7842 607865
EXTERNAL LINKS & REFERENCE
Servo City 48_pitch_plain_bore_gears The Engineer worlds-largest-solar-powered-boat-visits-london http://en.wikipedia.org/wiki/Ironclad_warship http://www.servocity.com/html/48_pitch_plain_bore_gears.html http://www.theengineer.co.uk/video/worlds-largest-solar-powered-boat-visits-london/1017050.article http://www-robotics.jpl.nasa.gov/publications/Yoshiaki_Kuwata/Kuwata11IROS_final_v3.pdf http://www.cyberiad.net/leo.htm
Starting with the U.S. Civil War the world's navies ditched wood and sails in favor of fossil fuel-powered, armored dreadnoughts (battleships). This scene depicts the Battle of Hampton Roads in 1862 between the USS Monitor (far left) and CSS Virginia (middle) with the then conventional sailboats taking a back seat.
An ironclad was a steam-propelled warship protected by iron or steel armor plates. The ironclad was developed as a result of the vulnerability of wooden warships to explosive or incendiary shells. The first ironclad battleship, 'Gloire,' was launched by the French Navy in November 1859. The British Admiralty had been considering armored warships since 1856 and prepared a draft design for an armored corvette in 1857; in early 1859 the Royal Navy started building two iron-hulled armored frigates, and by 1861 had made the decision to move to an all-armored battle fleet. After the first clashes of ironclads (both with wooden ships and with one another) took place in 1862 during the American Civil War, it became clear that the ironclad had replaced the unarmored ship of the line as the most powerful warship afloat.
Ironclads were designed for several roles, including as high seas battleships, coastal defense ships, and long-range cruisers. The rapid evolution of warship design in the late 19th century transformed the ironclad from a wooden-hulled vessel that carried sails to supplement its steam engines into the steel-built, turreted battleships and cruisers familiar in the 20th century. This change was pushed forward by the development of heavier naval guns (the ironclads of the 1880s carried some of the heaviest guns ever mounted at sea), more sophisticated steam engines, and advances in metallurgy which made steel shipbuilding possible.
ACIDIFICATION - ADRIATIC - ARCTIC - ATLANTIC - BALTIC - BERING - CARIBBEAN - CORAL - EAST CHINA ENGLISH CH - GOC - GULF MEXICO - INDIAN - IRC - MEDITERRANEAN - NORTH SEA - PACIFIC - PERSIAN GULF - SEA JAPAN STH
CHINA - PLASTIC
- PLANKTON - PLASTIC
OCEANS - SEA
LEVEL RISE - UNCLOS
- UNEP
WOC
- WWF
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
This page is Copyright © 2019 Bluebird Marine Systems Ltd. The names AmphiMax™, Bluebird™, Bluefish™, SeaNet™, SeaVax™ and the blue bird & fish in flight logos are trademarks. All other trademarks are hereby acknowledged. Contact Us.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||