|
DINO the DINOBOT - AUSTRALIAN BULLDOG ANT INSPIRES GIANT ROBOT
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIOLOGY - BLACK BOX - COMPUTERS - ELECTRONICS - ENERGY - FRAME - FORMICARIUM - GIMBALS - HEAD - JAWS - JIMMY WATSON - KITS - LEGS - MECHANICS - MOTORS - MOVIE - PHOTOGRAPHY - RASPBERRY Pi - R/C DRONE - SENTRY - SOFTWARE - SOUND PROOFING - SPACE ROVERS - SPEED - SUSPENSION - TAIL - WEAPONS - WARGAMING
|
|
DINO - THE DINOBOT - Now that is what we call a pair of jaws. The coloration of this animal is superb. You can see the ribs in the exoskeleton that reinforce the structure, that give ants one of the highest power to weight ratios in the animal kingdom. 'Dino' the 'DinoBot' is a fully functional educational robot, not a toy. The name comes from the fact that some ants are virtually unchanged since prehistoric times, hence: Dinosaur = Dino, and it is of course a giant robot = Bot. Put together this gives us 'DinoBot.' In the workshop we calling the prototype, affectionately: 'Dino,' after Fred Flintstones pet dinosaur.
2015 - One day, low cost insectoid robots may replace soldiers on the ground for (trauma free) battlefields of the future, or peace keeping missions at volatile geographical regions. Then of course, there will be fewer, if any wars at all and civil disturbances are less likely. This Bulldog ant that was brought over from Australia 33 years ago, was the inspiration for an 8 foot (2.4 meter) robot, estimated to be able to sprint at near 20mph. The Bulldog ant (also known as the jack or jumper ant) above came all the way from Australia to be given to an inventor in Eastbourne. What do you do when you are given such a specimen? You make a protective display case of course. Then, 33 years later the specimen should look as good as the day it was preserved. The case above is proof of that theory and is part of a display at Herstmonceux (working) Museum in Sussex, kindly loaned to us for this article. Note the engraved brass plate with the Latin: Ponerinae Myrmecia inscribed below the common name for this animal.
About 33 years ago in late 1981, Max Askaroff, the son of a Russian émigré and an Austrian seamstress, came home to Eastbourne from an extended tour of Australia, bringing with him a large tarantula, a scorpion and a bulldog ant (that is about 25mm long) in a jar. We are not sure if that was entirely in keeping with quarantine restrictions, but the specimens were dead on arrival in the UK anyway - and in a sealed glass jar. Incredibly, the much smaller ant had killed and eaten the large spider and the scorpion.
Max knew of an unusual chap in the UK who had kept wood ants in a formicarium in Seaford, and had from these studies developed the mechanics for the design of a large robot. Max and his brothers did not pretend to understand why anyone would want to build a robot based on an ant, and on occasion openly said as much. But one of his brothers attended Eastbourne College of Further Education (now Sussex Downs) doing an engineering course, where the madman was a table football champion on the same course.
It was love at first sight, as any roboteer will testify to the attraction of an aggressive insect, over a relatively mild social creature, such as Formica Rufus.
The Bulldog ant was mounted on a length of titanium wire using superglue, with the wire fixed into a drilling in a base of clear polycarbonate. The polycarbonate was drilled ready for fixing to a clear case that would be glued together. You need sharp drills for plastics when drilling near the edges like this.
GIANT ANT TAIL - This is a picture of a tail that is 110 times the size of the real ant on this page - see the photo further down on this page - of this tail with matching body and head mould masters. Click on the picture above to find out how to make your own giant insect model. This photograph is copyright © Jameson Hunter Ltd 2015. You will need permission from Jameson Hunter to be able to reproduce it.
A case was made and fixed together with adhesive. In hindsight, it might have been better to use glass, which, when bonded remains clear on the edges. That would then have created the problem of fixing the base. It proved to be a good idea to keep the container open-able, when the inside of the housing became stained from what we can only imagine were remnant fluids of the insect drying out over many years.
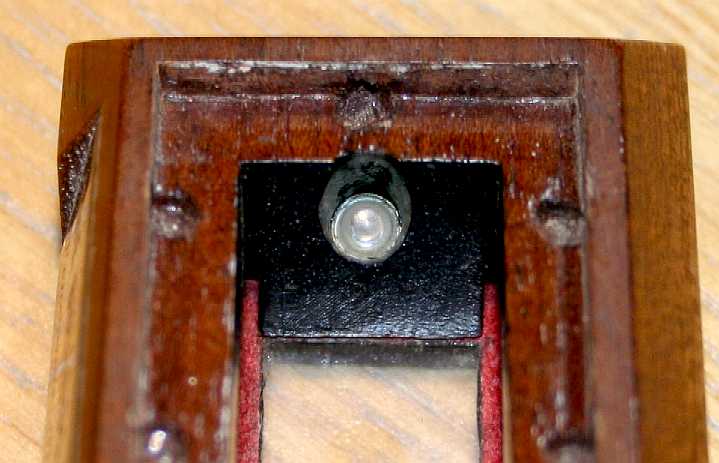
A piece of mahogany was sourced that was cut to size, beveled and the inside carved out to accept the clear polycarbonate housing. In the picture above you can see that a miniature light bulb was fitted from the underside, aiming at the underside of the bulldog ant through the clear plastic base. This was useful for inspection purposes and could also be illuminated as part of a display. Today, that would have been an LED. Note the lavish coat of varnish that protects the wood and the recesses for the screws at the base of the clear casing - for a super snug fit.
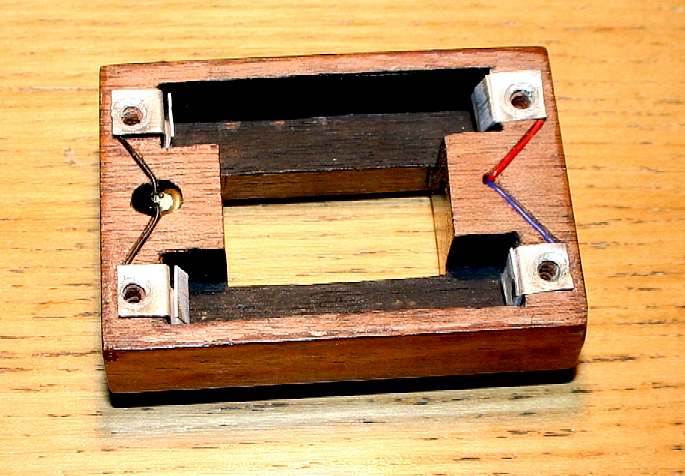
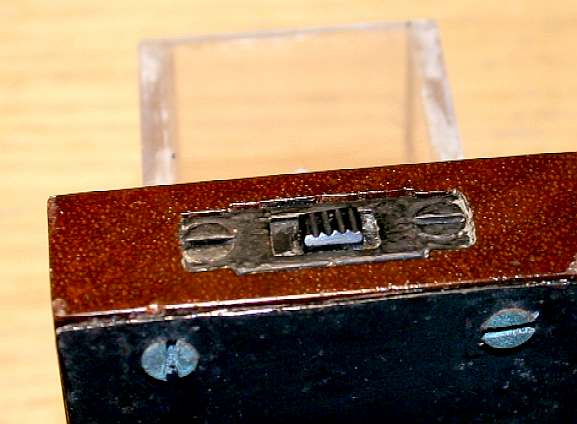
This is a picture of the mahogany base with the protective plate removed to be able to replace the lighting batteries. On the left you can see the light bulb with black wires leading in channels in the wood to battery terminals made of metal. The inside is matt blacked to prevent glare on the subject. On the right we see red and blue wires leading to and from the side mounted switch that is seen in a picture below.
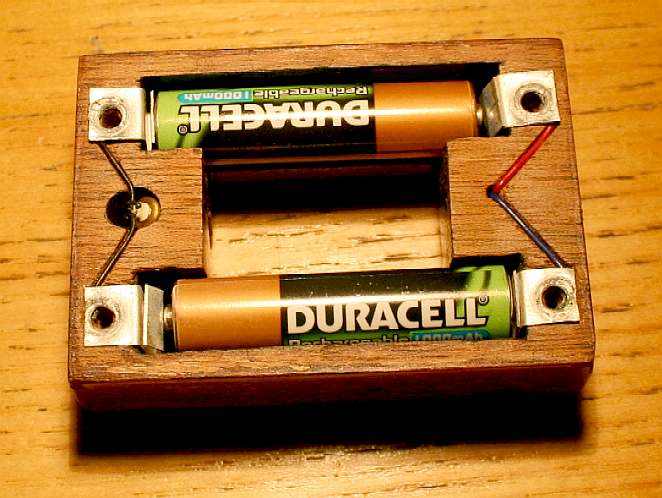
Here you can see the Duracell® batteries installed. These are rechargeable. If there is even an upgrade of this showcase, or another is made for different specimens, it would for sure include lithium ion batteries, LED lighting and solar panel capture of energy for automatic lighting at night. Please note that the photographs of the Bulldog Ant and display case are Copyright © Bluebird Marine Systems Ltd, 2014. You will need our permission in writing to reproduce them, except for school, college or university studies - for which permission is hereby granted provided that you acknowledge the source with a hyperlink to this page.
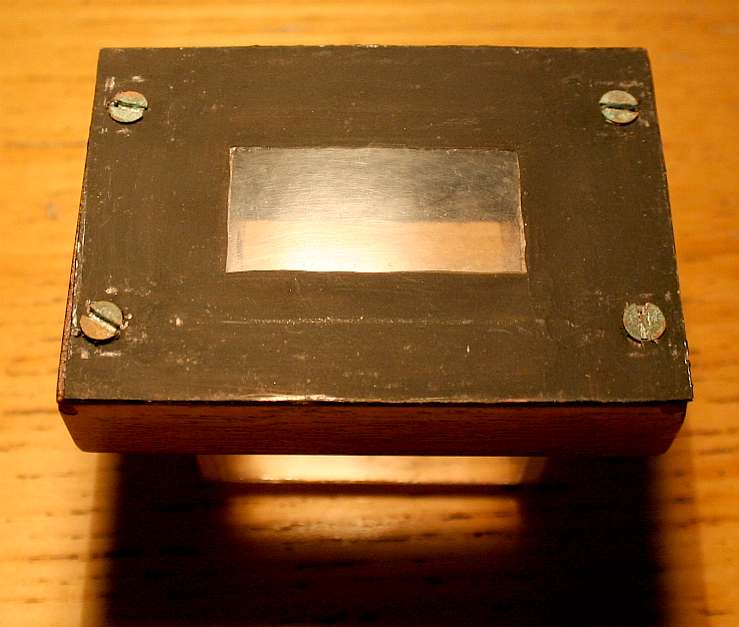
The protective cover is screwed back in place with brass screws once the fresh batteries are installed. Through this window, the underside of the ant may be seen with the benefit of a correctly aimed light. Most display cases are solid at the base, so would not allow full inspection.
This is the switch on the side of the mahogany base. It is one of the slide type used in many models and computers. You can see that over the 33 years (so far) that the unit has taken a few knocks, and that the brass screws have corroded. They are though bright on the thread.
The case protects the specimen from large human hands, while allowing safe inspection and also protecting the bulldog ant from harmful radiation and oxidation. It is a kind of mausoleum that any human would be proud to call his final resting place. The ancient Egyptians would be especially interested. Maybe even Cleopatra
The view from above, with a freshly minted two pence coin showing Queen Elizabeth on the obverse, to get an idea of scale. The mahogany was carved using a 6mm Stanley chisel and a modeling knife. A small hand drill was used with high speed drills to make the holes for screws. Always use the correct size drill for your fixings such as not to strain plastics in particular - they are prone to splitting at the slightest excuse.
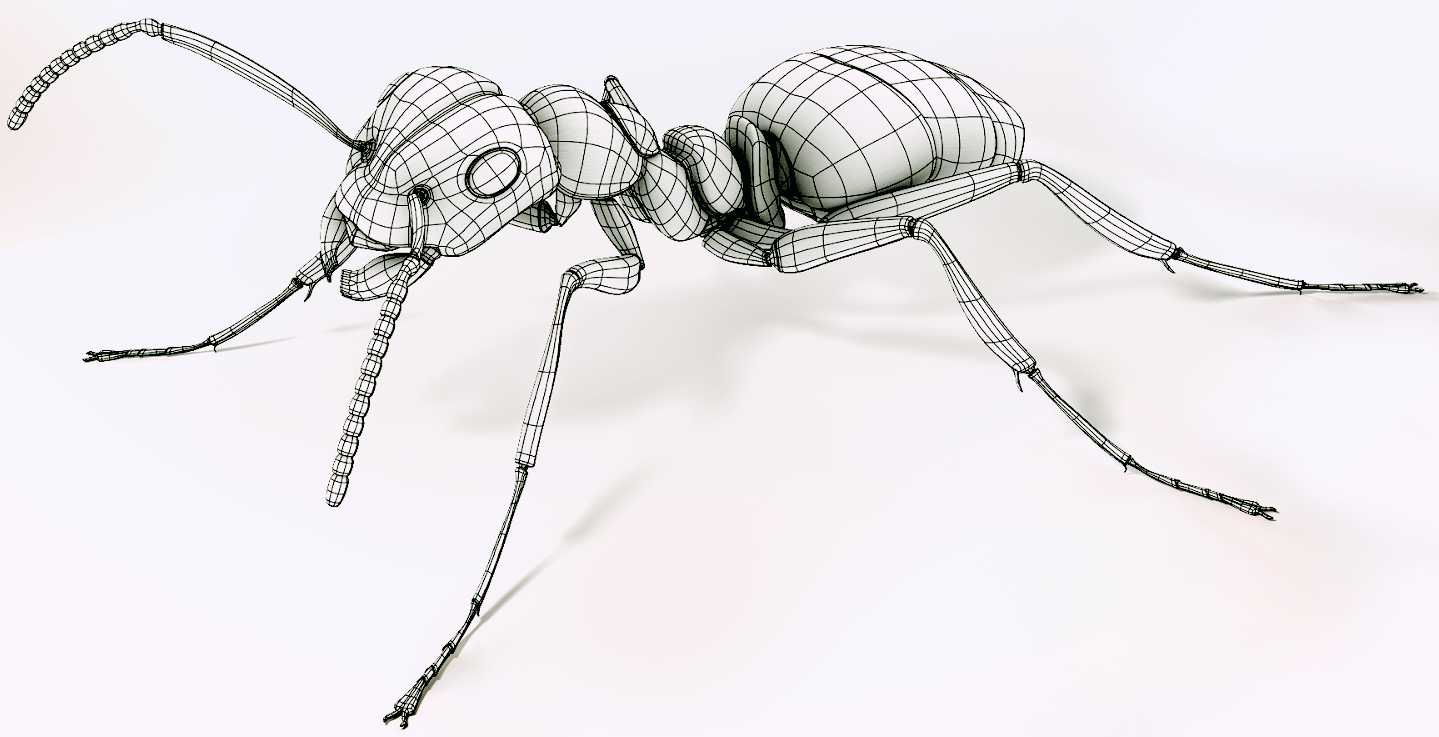
This is a CAD drawing taken from the 110 x full size drawings made from the insect above. BMS Ltd have the original paper drawings and the CAD file. Bluebird Marine Systems will provide free workshop space and equipment to any person wishing to complete the build of this 2.4 meter robot ant. This includes a consultant to help with welding, mechanical fabrication, hydraulics and the making of composite moulds, etc., that may be needed to get this project up and running. Contact us for more information and ask for Leslie. This is an ideal project for degree students.
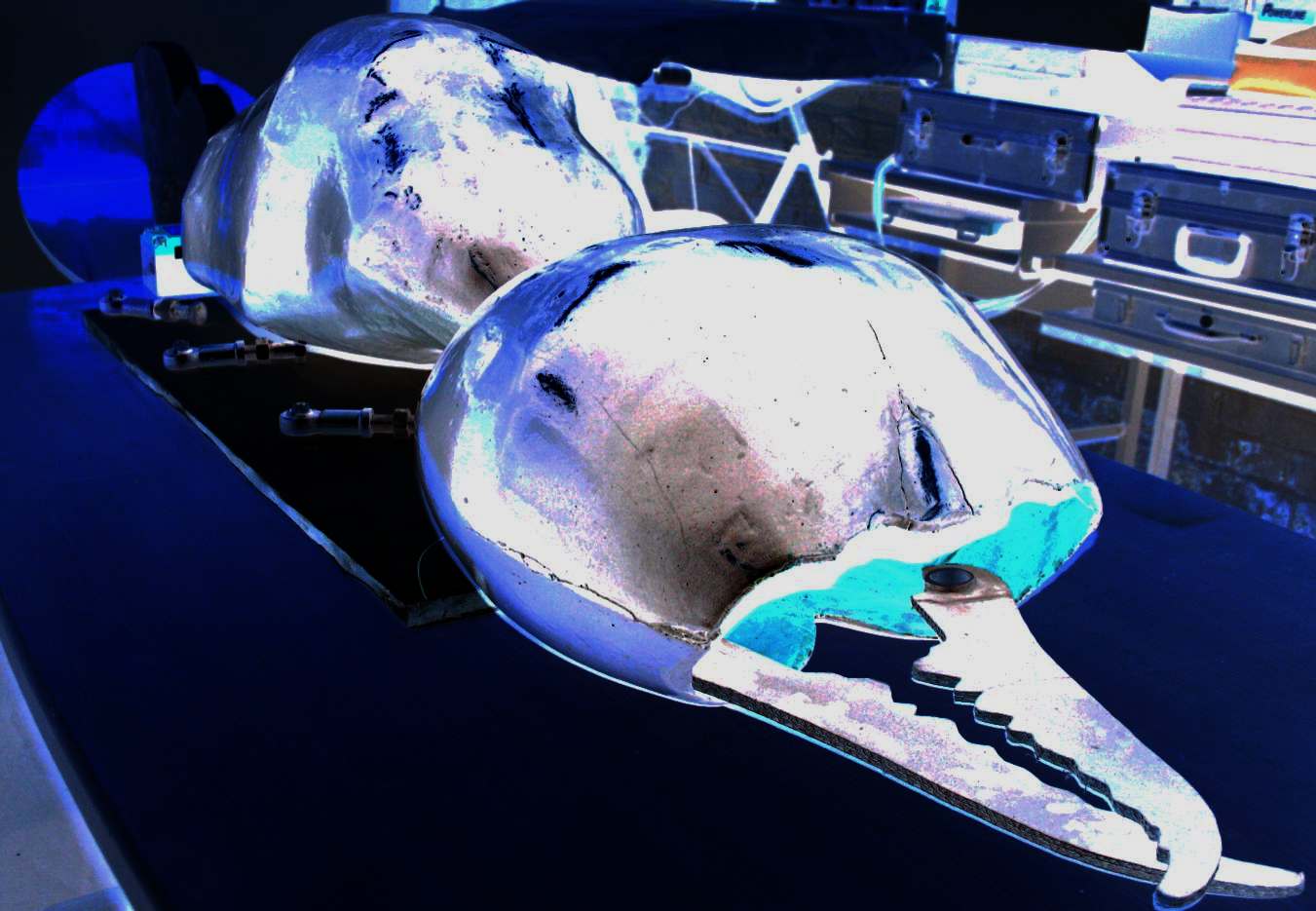
HEAD, BODY & TAIL - December 12 2015 - The artwork for the master moulds for the three main body parts are shown here together; the tail is now black, but still needs surface finishing. As an engineering structure, ants have a high degree of angular movement. That is because they live in a no-compromise and very competitive environment. These insects do not reason or theorize, it is either kill or be killed. More socially developed ant colonies herd aphids for their nectar and even tend fungus mounds for food, like human farmers. The jumper ant can be a solitary hunter. One clue to lifestyle is the location of their compound eyes, at the front of the head for stereoscopic ranging. Social ants have their eyes more to the rear of the head, to look out for birds, etc. The main weapon of an ant is the sting, which can be much modified to spray acid or release toxic gels. You may be able to buy this giant ant as a kit, or assembled, from 2016. Please note that this photograph is copyright © Jameson Hunter Ltd 2015. You will need permission from Jameson Hunter to be able to reproduce it.
2016 - Jameson Hunter Ltd, a new movie producer in the United Kingdom, has asked us to look at possible designs to make a giant special effects robot that is fully functional. Please note that this photograph is copyright © Jameson Hunter Ltd 2015. You will need permission from Jameson Hunter to be able to reproduce it.
ANT ROBOTICS
Ten
years later in 1991, American electrical engineer James McLurkin conceptualized the idea of "robot ants" while working at the
MIT Computer Science and Artificial Intelligence Laboratory at the Massachusetts Institute of Technology. The robots consisted of sensors, infrared emitters, and communication systems capable of detecting objects in their path. McLurkin's invention was,
like our inventor
in Eastbourne, through studying the behavior of real ants in ant colonies and keeping ant farms as a basis for his programming. Through this examination, he could better understand how insects structured their workloads in order to produce a viable and working prototype of robotic ants.
Would you want to be confronted by a 2.4 meter robot that was armed with tazers?
ANT COLONY OPTIMIZATION ALGORITHMS
MAKE A
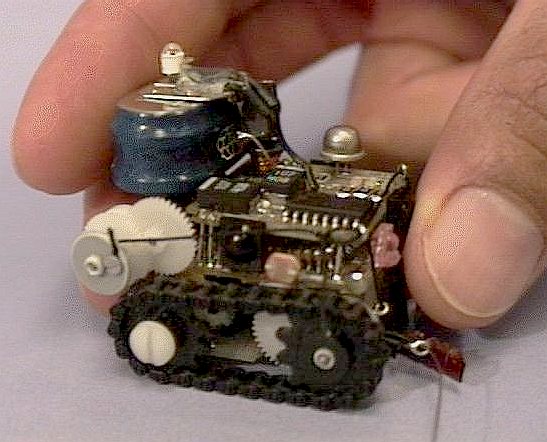
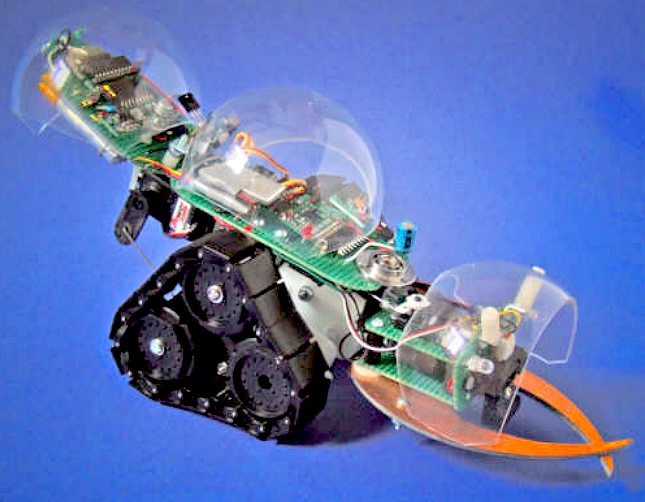
ROBOT ANT - Not exactly ant like in the visual department, but you can
build a tracked robot ant that can be remote controlled or operate autonomously. Using an infrared detector, it can find and pick up objects. It is controlled by a Picaxe 20x-2 microcontroller.
While this is a fairly intricate robot, some of the motor techniques and circuits can be used for other simpler robots.
This instructable
shows how to:
MIT MICRO ROBOTS
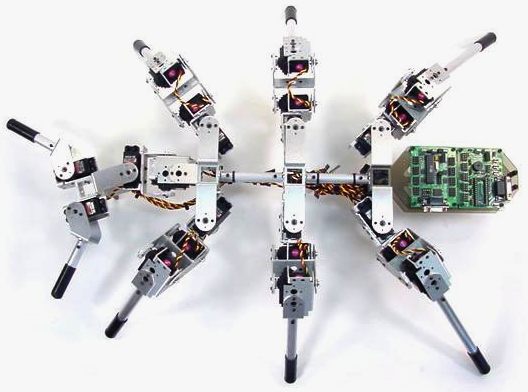
The Ants are a community of cubic-inch microrobots at the MIT Artificial Intelligence Lab. There are two main goals for this project. The first is to push the limits of microrobotics by integrating many sensors and actuators into a small package. The second is to form a structured robotic community from the interactions of many simple individuals. The inspiration behind this idea comes from nature -- the ant colony.
In order to accomplish these goals, the robots have been equipped with sensors and actuators designed with their natural counterparts in mind. Each robot has 17 sensors including; four light sensors, four IR (infrared) receivers, bump sensors, food sensors, and a tilt sensor. They communicate with each other using two IR emitters, one mounted on the front of the robot and one mounted on the top.
There are several levels of social behavior before reaching the goal of the ant colony. Right now, the robots can play Follow the Leader, Tag and Manhunt. Manhunt is similar to tag except there are two teams. The final game before the full-fledged Ant Farm is Capture the Flag.
There are many application for robotic communities, including explosive ordnance disposal, and Mars exploration.
Anita Flynn, Consultant, MicroPropulsion Corp. Dr. Anita Flynn received BS, MS, and PhD degrees in EECS from MIT in '83, '85 and '95, respectively. From '95 to '97, she was a lecturer and postdoc in the UC Berkeley EECS Dept. Subsequently, she co-founded MicroPropulsion Corp. which conducts contracting and consulting work in robotics, electronics, and embedded software for numerous Silicon Valley companies. She spent one year as a Visiting Assistant Professor in the UC Berkeley Mechanical Engineering Dept. ('99 to '00). From 10-06 to 3-08, MicroPropulsion was one of four prime contractors in the DARPA Nano Air Vehicle program. Recently, she has been working as a Visiting Researcher in Prof. Kris Pister's Smart Dust Group at BSAC, UC Berkeley.
If you're interested in building your own robots, one of the best (or only) source for beginners is Prof. Anita Flynn's book, Mobile Robots: Inspiration to Implementation. For robot parts, try The Robot Store.
STUDY CLAIMS HUMANS WILL COMPETE FOR JOBS WITH DROIDS
By 2040, cabs will be driven by
Google
robots, shops will become showrooms for online outlets and call centres will be staffed by intelligent droids.
FORTUNE and ENTREPRENEUR, APRIL 2015 - GIANT ROBOTIC ANTS COULD REPLACE HUMANS
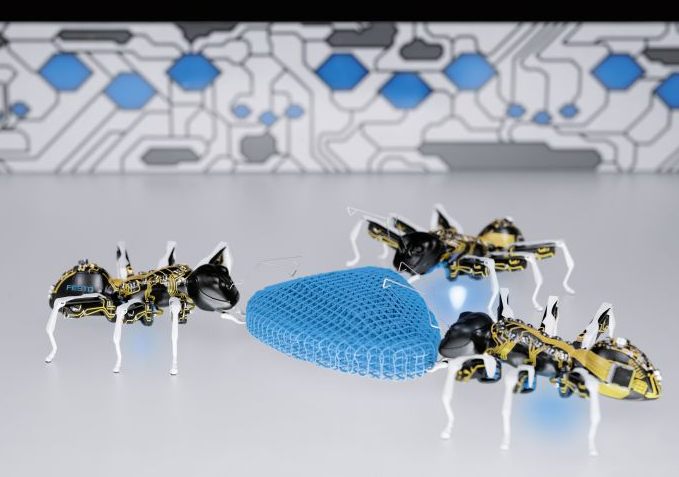
Someday, just maybe, the modern factory worker could be replaced completely by technology. It’s a scary thought for some. What’s creepier still is that the factory worker of the future could be an ant. Actually, an army of artificially intelligent cyborg ants. Synthetic critters that are smart enough to work together to crush a common goal.
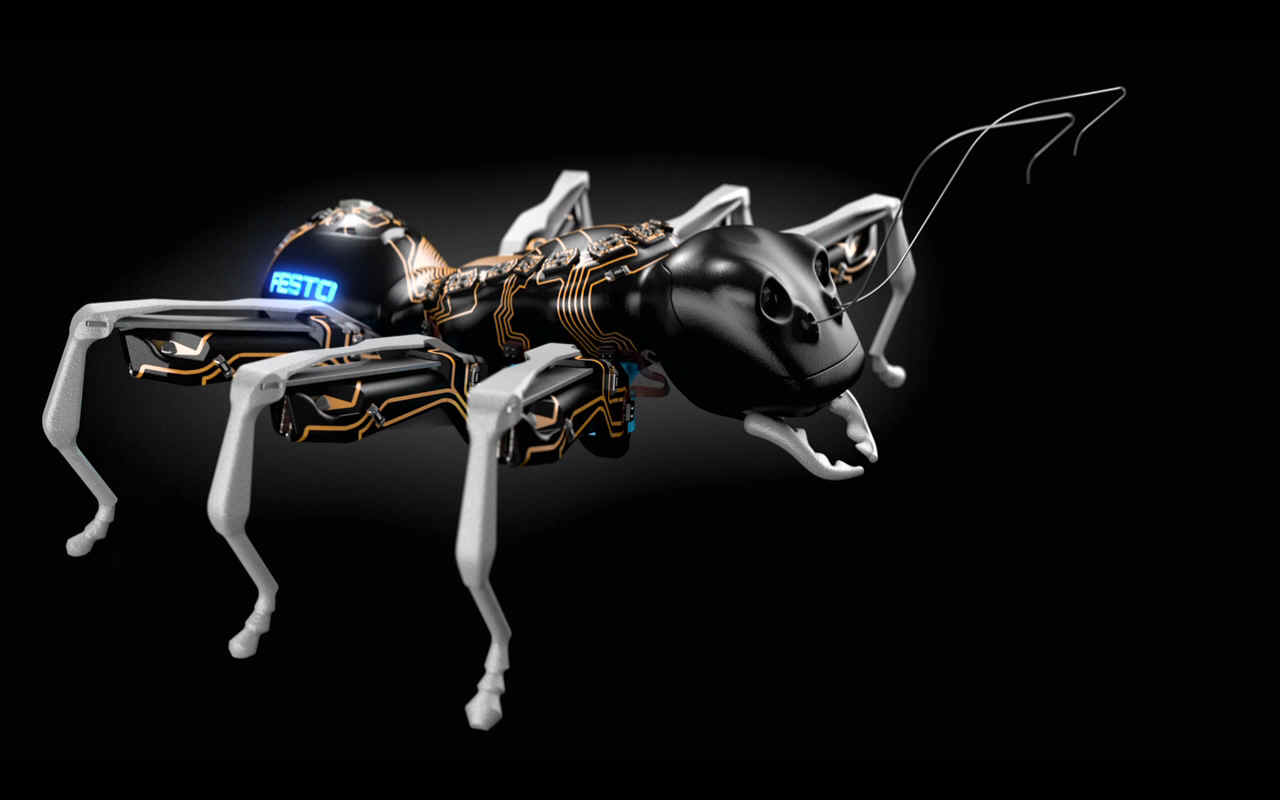
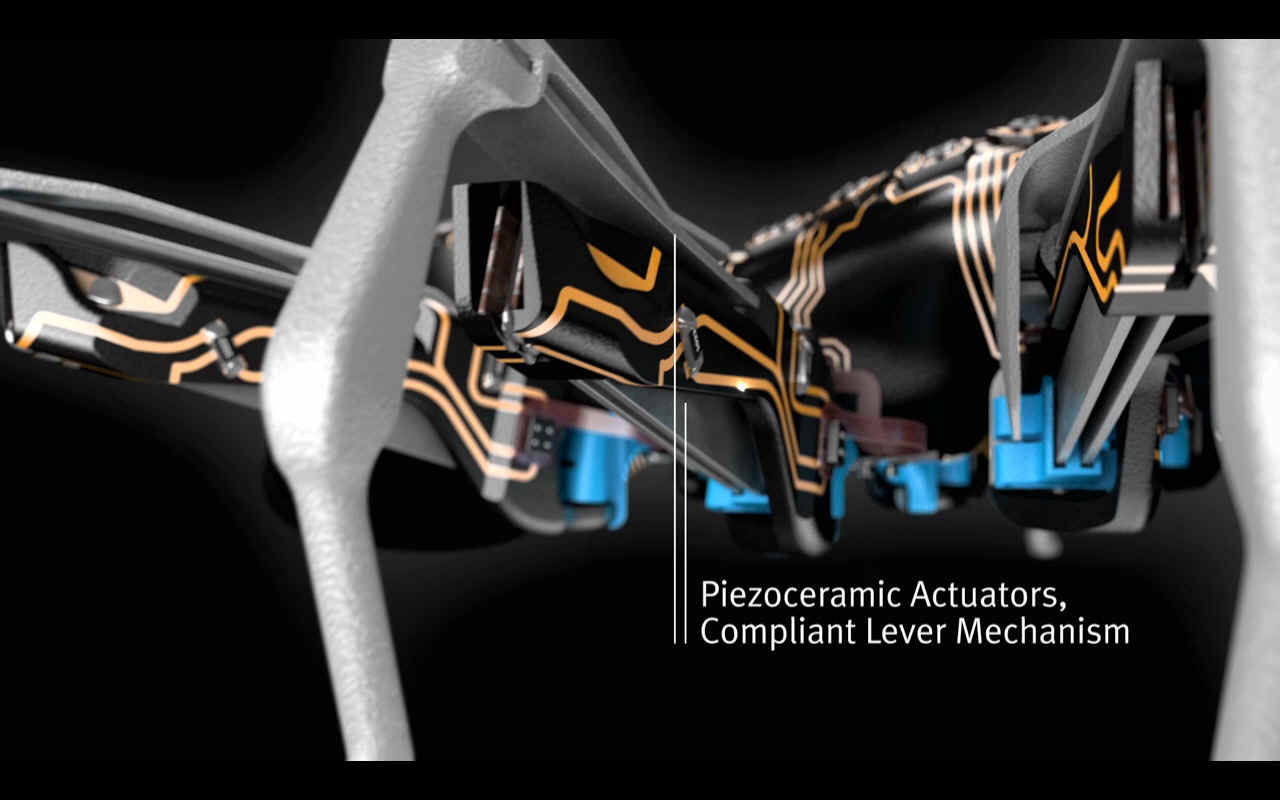
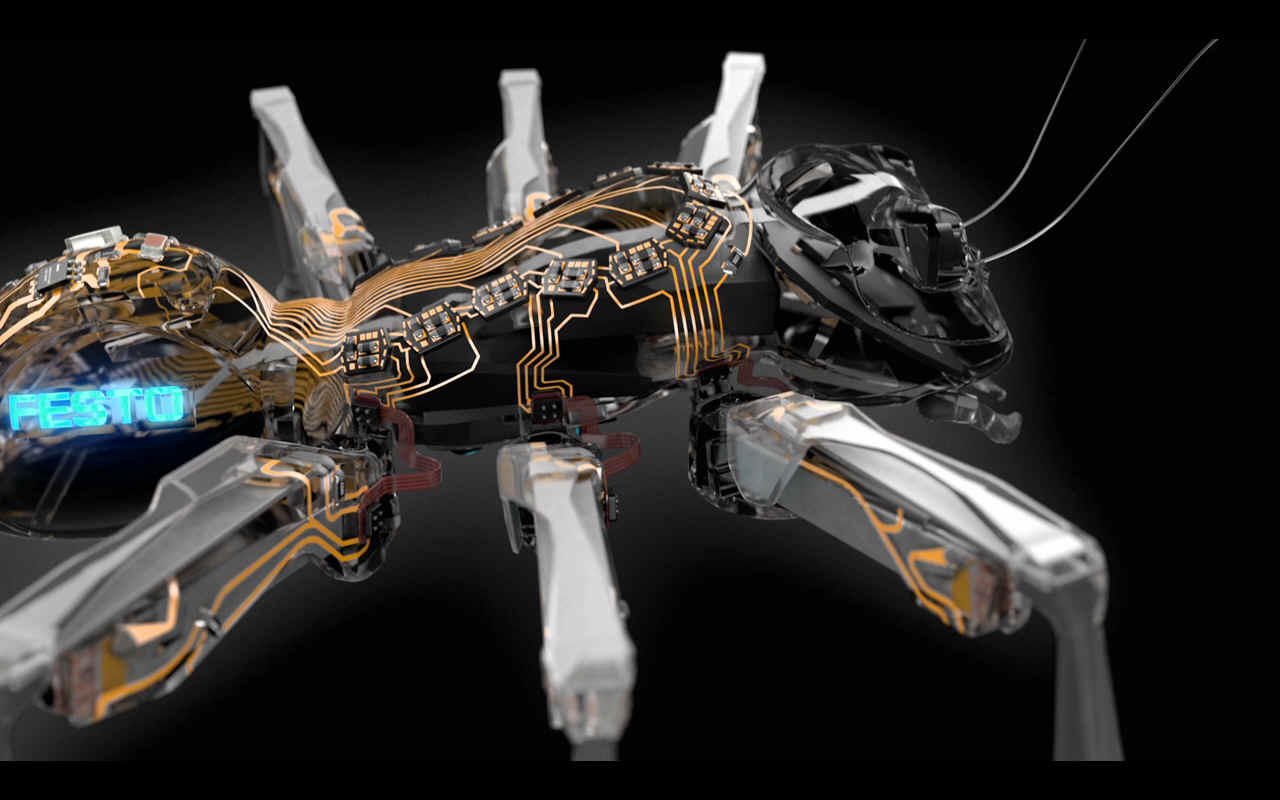
They’re called BionicANTs and they can even adapt to fluctuating production demands by wirelessly telling each other what’s up. And at 5 inches long, 6 inches wide and 1.5 inches tall (about the size of an adult hand) these buggers are the perfect size for your robot apocalypse nightmares.
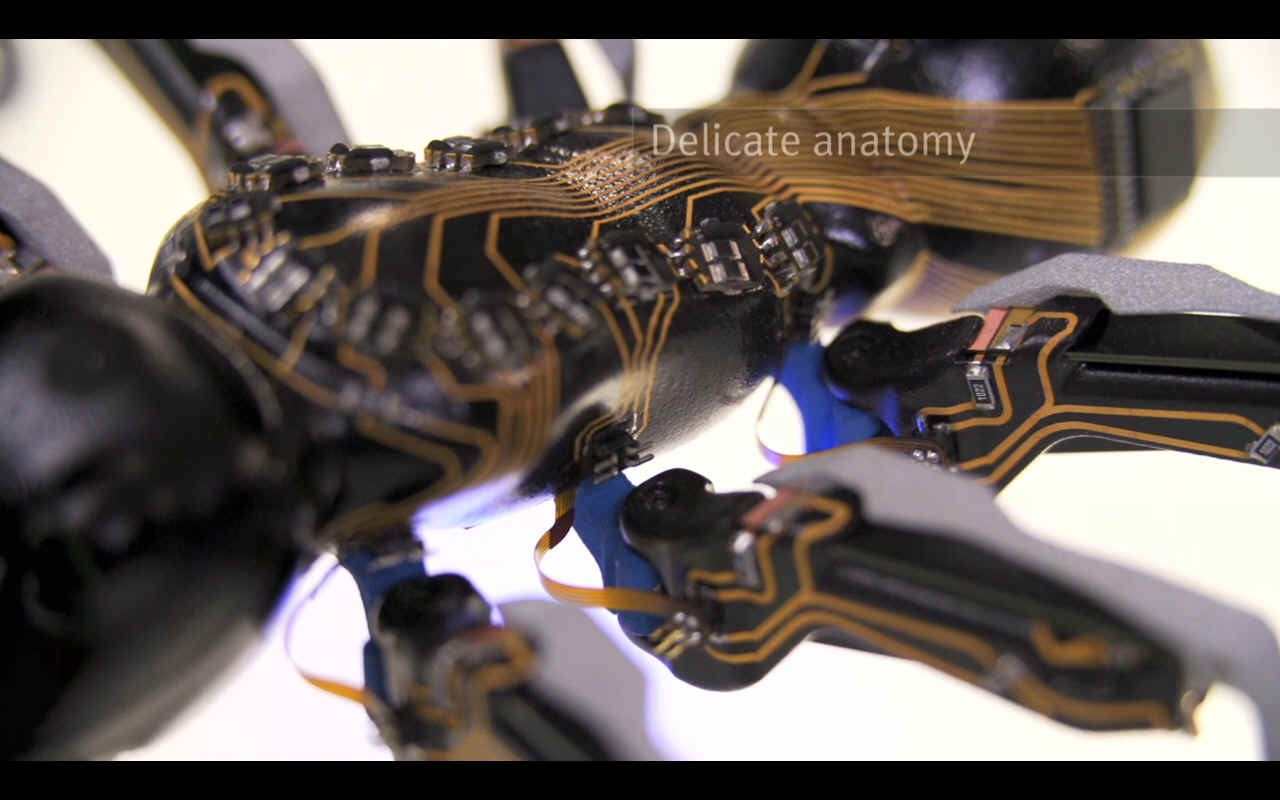
Inspired by their industrious counterparts in nature, they come equipped with a bulbous plastic abdomen, six strong, jointed legs, two antennae, serrated pincers and faces that appear to be grinning. The ANT part of the ants’ name stands for Autonomous Networking Technologies, basically the high-tech stuff that makes them tick. For that extra techie touch, their lightweight polyamide bodies and circuitry were 3-D printed using a laser … because of course they were.
ILLUSTRATION - From a mother to her son, an amusing message in the form of a brilliant graphic on a napkin with a message: Love Mum.
The artificial ants were invented by the brains at Festo, a Germany-based global industrial control and automation engineering firm. For centuries, even dating back to the time of Aesop, ants have been used to teach the virtues of hard work, a fact not lost on the engineers at Festo.
Festo’s aim in building a complex, algorithm-controlled robotic ant army is to use them to “demonstrate how autonomous individual components can solve a complex task together, working as an overall networked system.” Translation: These A.I. ants work awesomely together to achieve a shared production goal.
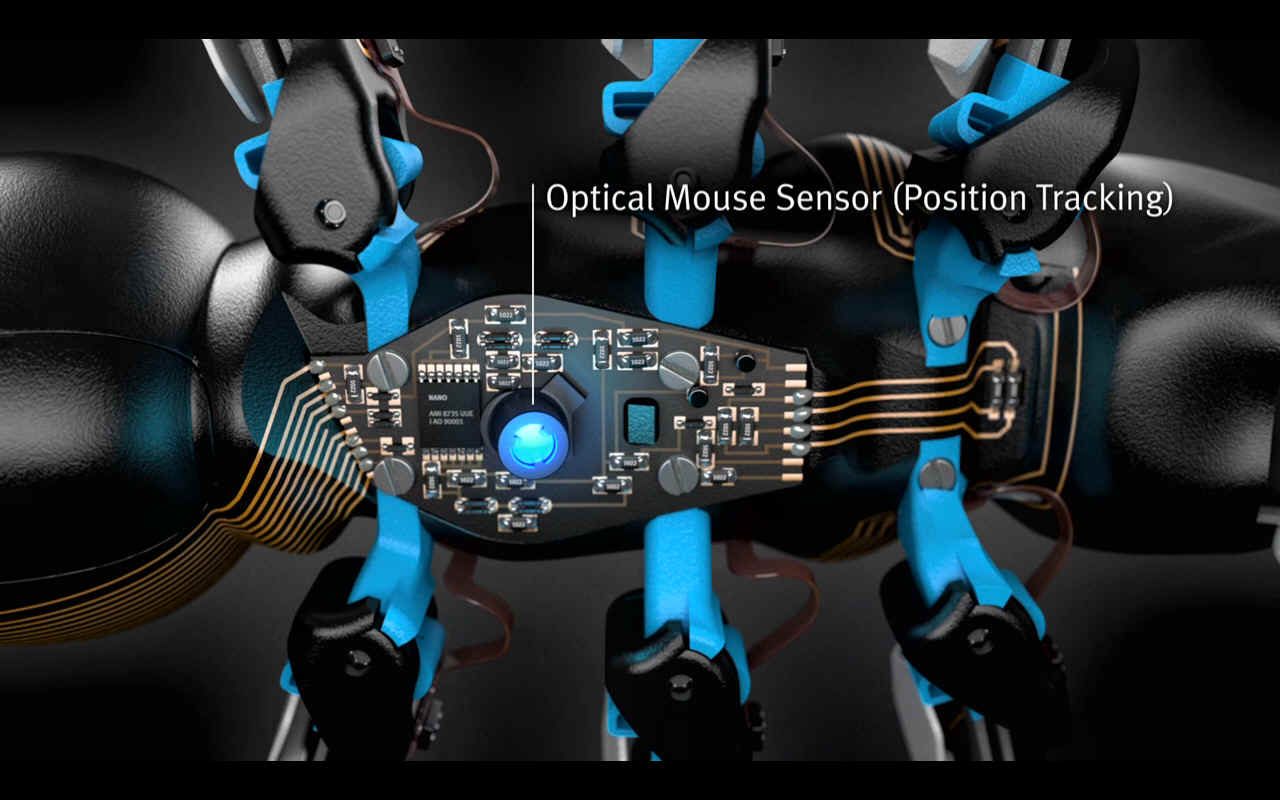
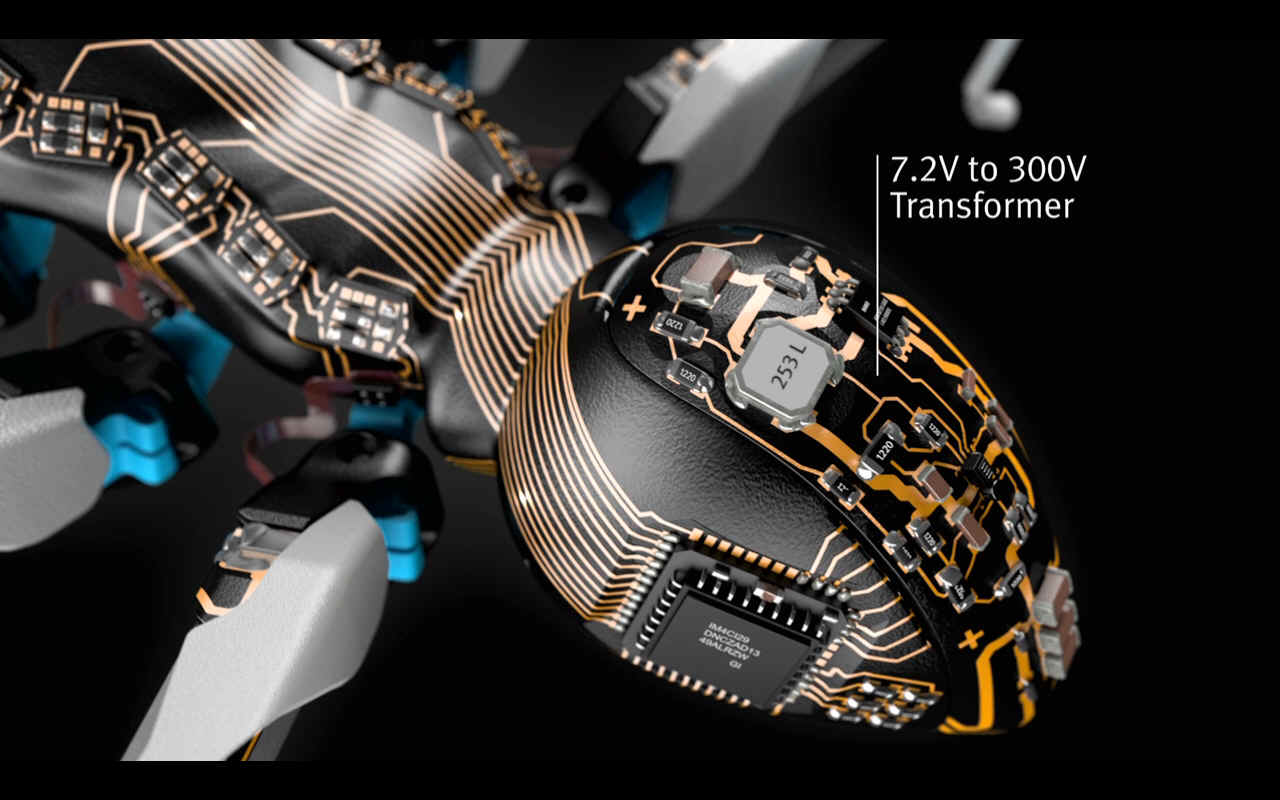
Like their real-world role models, lithium battery-powered BionicANTS are engineered to be cooperative, working for the greater good of the colony, so to speak. Opto-electrical floor sensors, radio modules and stereoscopic cameras enable the ants to figure out where they are and help them locate objects.
The jagged pincers sticking out of their heads allow them to pick up, drag and drop small objects. To recharge, they simply lean their steel antennae feelers against a charging station. Smart, right?
While the ants aren’t for sale just yet, their potential uses are intriguing. What if they someday have wings? Will they be able to assemble things? Which industrial arenas could benefit most from them?
SIMANT ELECTRONIC ANT COLONY
The
SimAnt Electronic Ant Colony is a 1991 life simulation video game by Maxis and Maxis'
(3rd product) focusing on ants. It was designed by Will Wright, maker of other 'Sim' games such as SimCity and The Sims. In 1992, it was named "Best Simulation Program" at the Software Publisher Association's CODiE Awards.
The maritime industry is blazing a trail with
Rolls-Royce
currently working on autonomous vessels in order to have greater security for the seamen. The engineers of the firm hope that in near future they would be able to sail remotely controlled and unmanned cargo ships. The artists impressions above show the company ships loaded with containers at the front and rear, without the bridge structure where the crew lives. Replacing the bridge and other systems that support the crew, such as electricity, air conditioning, water and the waste water reduces the cost and increases the revenue, Levander is quoted as saying. The ships would be 5% lighter before loading the cargo and burn 12-15% less fuel, he said. It also eliminates any risk to crew safety (accidents, storms, pirates). The ultimate goal is to develop a remotely controlled ships which are also secure. These unmanned ships may well become a standard of tomorrow. Years of research will be needed to see these freighters traveling the oceans. However, disruptive technology like this could well upset the shipping industry, that is then bound to resist change for all it is worth.
ROBOT LINKS
Amazon Mobile Robots Inspiration Implementation 2nd Edition Wikipedia Ant_colony_optimization TFW 2005 Boards 752788 bulldog ant inferno Bloomberg Rolls-Royce drone ships challenge 375 billion industry freight Technocrazed Autonomous-unmanned-vessels-will-revolutionize-the-shipping-industry Spectrum IEEE Robotics - Spectrum IEEE Robotics DIY Fortune April 2015 giant robotic ants could replace factory workers
http://www.instructables.com/id/Make-A-Robot-Ant/ http://www.instructables.com/id/Picaxe-Projects-1-Making-Fast-Printed-Circuit-Mo/ http://fortune.com/2015/04/03/giant-robotic-ants-could-replace-factory-workers/ http://www.entrepreneur.com/ http://www.taser.com/ http://www.sussexdowns.ac.uk/ http://en.wikipedia.org/wiki/Taser http://jonathanwerlen.blogspot.co.uk/ http://www.bloomberg.com/news/2014-02-25/rolls-royce-drone-ships-challenge-375-billion-industry-freight.html http://www.technocrazed.com/autonomous-unmanned-vessels-will-revolutionize-the-shipping-industry http://spectrum.ieee.org/robotics http://spectrum.ieee.org/robotics/diy http://www.amazon.com/Mobile-Robots-Inspiration-Implementation-Edition/dp/1568810970 http://www.ai.mit.edu/projects/ants/ http://en.wikipedia.org/wiki/Ant_colony_optimization http://en.wikipedia.org/wiki/SimAnt http://en.wikipedia.org/wiki/Formicarium http://en.wikipedia.org/wiki/Ant_robotics http://www.xpatjobs.com/ https://www.facebook.com/EntMagazine/videos/10153215946558896/ http://www.tfw2005.com/boards/radicons-customs/752788-bulldog-ant-inferno.html
MOVIE IDEA - Lurking beneath the Antarctic ice is a discovery that scientists will die for - literally. This story is now the subject of a low budget film pilot to be produced mostly in the UK. The promoters are looking for backers. The UK will contribute 20% toward production costs. Roughly 60% of a low budget film may be pre-sold as distribution rights, leaving 20% finance on offer. The deal is that Angels recover 120% on their equity shares within 12 months of shooting, with an income stream thereafter from networks and merchandising. Producers and directors please take note that there is a significant audience for well made movies of this genre. Look at what happened when they remade Godzilla.
A Sectasaur™ (thawed) - now on permanent display at Herstmonceux Museum, in Sussex, England.
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIOLOGY - BLACK BOX - COMPUTERS - ELECTRONICS - ENERGY - FRAME - HEAD - JAWS - JIMMY WATSON - KITS - LEGS - MECHANICS - MOTORS - MOVIE - PHOTOGRAPHY - RASPBERRY Pi - R/C DRONE - SENTRY - SOFTWARE - SOUND PROOFING - SPEED - SUSPENSION - TAIL - WEAPONS - WARGAMING
DINOSAURS - DOLPHINS - HUMANOIDS - RAYS - SHARKS - WHALES
ARDUINO - ARM HOLDINGS - BEAGLEBOARD - MBED - PCBS - PICAXE - RASPBERRY PI
|
|
This website is Copyright © 2023 Bluebird Marine Systems Limited. The names Bluebird™, Bluefish™, Ecostar DC50™, Miss Ocean™ and the blue bird and fish in flight logos are trademarks. All other trademarks are hereby acknowledged. IMPORTANT NOTE: Under no circumstances may our products, or those of Jameson Hunter Ltd used by any military or law enforcement organization, for any warlike, combat, or peacekeeping crowd control purposes. Anyone purchasing one of these units will be required to sign a binding undertaking (Deed) to that effect. Any unit found to have been purchased by proxy, will be confiscated, along with civil remedy in respect of breach of contract, that all parties in the chain will be vicariously liable for - to include damages for vehicles developed from our designs without our consent - and possible fraud issue from the deception. In addition to copyright theft, the law of passing-off applies.
|