|
DINOBOT - STANDBY ENDURANCE SENTRY DUTY
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIOLOGY - BLACK BOX - COMPUTERS - ELECTRONICS - ENERGY - FRAME FORMICARIUM - HEAD - JAWS - JIMMY WATSON - KITS - LEGS - MECHANICS - MOTORS - MOVIE - PHOTOGRAPHY - RASPBERRY Pi R/C DRONE - SENTRY SOFTWARE - SOUND PROOFING - SPACE ROVERS - SPEED - SUSPENSION - TAIL - UKRAINE DRONES - WEAPONS - WARGAMING
|
||
|
ENDURANCE - Is keeping your DinoBot on station for weeks at a time, without exhausting the onboard energy storage. How do we do that?
CHRISTMAS GIANT ROBOT ANT PROJECT - POWERING DOWN
Powering down your DinoBot is just as important as powering it up for action - autonomously. There is no point wasting energy. Just be sure that powering back up again does not take too long.
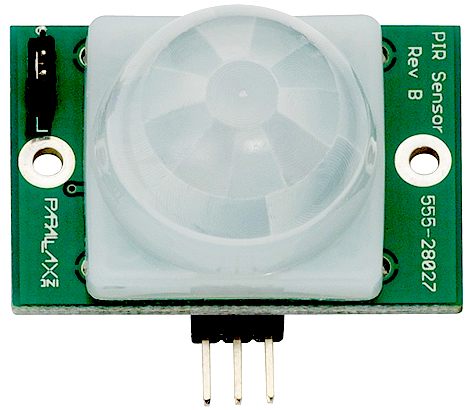
One of the finest examples of a system that is on standby and powers up instantly, is the ordinary security light that we use outside our houses to light up a footpath, or to detect a person coming home on a dark night, when they want to be able to see where the door lock is - or warn us of intruders. The electronics for these lights have developed to a fine art. They are economical and reliable devices that we use every day, an example of which is seen below.
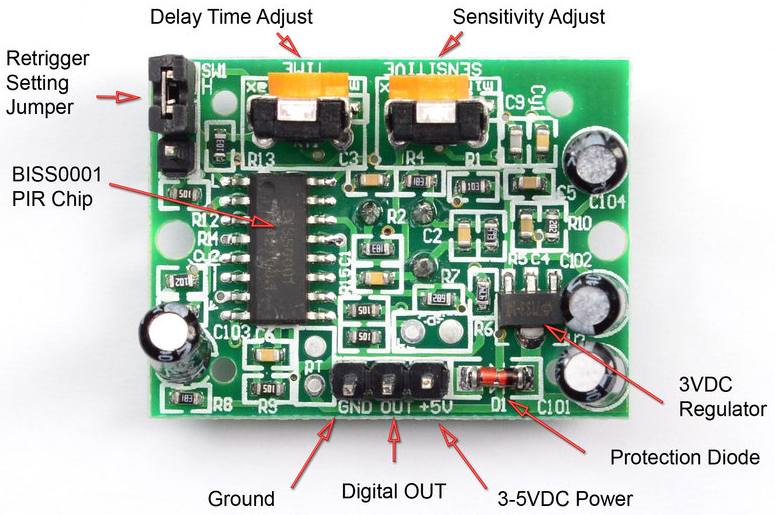
PHOTODIODE SENSORS - Inside your domestic security light you will find these components. We will use the basic idea to make Dino the DinoBot react to guests, but passively. Using these circuits, Dino will be aware of people approaching - and be able to greet them. If the person comes close and speaks to Dino, then Dino will be able to respond audibly, and move its head, or even walk to track the person.
ADAPTATION
Outside security lights use Passive Infrared Sensors (PIRs) as motion detectors to detect the movement of animals from their body heat, and LED Photodiodes to detect and respond to changing light conditions. With only slight modification we can use these circuits for our prehistoric bulldog ant, to put the robot into hibernation and to come alive when an animal approaches. No movement would equal sleep mode. PIRs also detect mechanical movement from the heat signature of some machines.
A DinoBot would make a great addition to your home security lighting, doing away with the need for a dog to bark at uninvited guests or to shoo squirrels or other vermin away, when your cat is less than enthusiastic, or where the numbers are simply too much for a lone moggy. Intruders would think twice about entering your premises uninvited, if they saw a robot sentry in the grounds.
Check out the video above from Kurt Grandis, taking the approach of object recognition by training a computer system to recognize the shape of squirrels and squirt water at them, which, proved to be ineffective long term, but was a good effort. Kurt needs our paintball head - possibly a bit of overkill for squirrels. We do not advocate harming wildlife.
It is possible to achieve the same results without programming in object recognition, using clever electronic design. That said, a combination of simple electronics and computers is probably a sensible compromise solution, where directional PIRs are the triggers to activate onboard programs - with electronic subroutines standing in to cope with boot-up time. Coincidentally, insects have compound eyes, so if we use multiple sensors, we are only emulating nature.
Object recognition is an expensive business when a few PIRs or longer range sensors is probably all that is needed in a local situation. For paintball gaming, it might be worth the programming time, unless you are happy to drive the robot like a drone, with human control of the steering and firing mechanism.
COLOUR
VISION
- In a paper published on the 20th May 2015, in proceedings of the Royal Society B, researchers Dr Yuri Ogawa and Dr Jan Hemmi from UWA’s School of Animal Biology showed for the first time that the
Australian bull ants (like humans) have three types of photoreceptors that are sensitive to different colours (UV, Blue and Green) and therefore the potential for trichromatic colour vision.
Two species investigated were completely nocturnal, so they only forage at night after dusk. That means they use their three different photoreceptors types at night, during light levels where
humans are completely colour blind.
In contrast to many other ant species, bull ants forage individually, do not lay pheromone trails like other ant species and use only vision to
navigate.
SELF DEFENCE
If you have a big house loaded with works of art, a determined burglar might try to disable your DinoBot with a firearm. So think about the bullet-proof bodywork option, if that is what you have in mind. It is a thought, but not many of us have a Van Gogh hanging in the study. There again you may have a nosey neighbour or a local tear-away to monitor - and even record on video.
SILENCE IS GOLDEN
Most robots are incredibly noisy machines. This is something we are taking seriously. There is not a lot of point building a useful robot if it sounds like a JCB is on the premises. The first thing to make sure of is that your basic movement (transmission) is efficient and well lubricated.
Electric motors make a lot of noise. We are looking at various ways of deadening the sound from these. We want a sentry that is as close to silent as possible, something that Boston Dynamics and Mark Zuckerberg are looking at.
SPACE EXPLORATION - Solar cells were developed for use in space by Bell laboratories in the 1950s with silicon solar cells @ 6% efficiency in 1954. In 1963 the Telstar 1 satellite was launched by NASA with solar cells powering telephone communications.
Flexible solar panels are now available that are flexible, light and more than 21% efficient at sensible prices, but it all began with scientists needing power for space exploration. Our objective is to blend solar cells into the head and body of the DinoBot discretely - with huge thanks to all of those inventors before us.
SOLAR PANEL MANUFACTURE - The above sequence shows solar cells being connected and encapsulated to make a production panel - finally loaded onto a pallet. This factory in China has a very good inspection regime. Each panel undergoes several visual inspections as it passes from one operation to another. You can see from the photos above that to produce the best quality panels, production operatives need to work in well lit, air conditioned premises, to keep dust out of the equation. Careful attention to detail and quality control regimes ensure that the products coming off the production line pass rigorous tests before being certified and shipped.
FREE ENERGY FROM NATURE
If we fit solar cells to Dino's head we can use the head servo motors to track the sun. We could do the same with Dino's abdomen, if we build in a rotation servo - no worries. This way we would not need to think about solar wings, though that is an interesting idea - if we build any giant beetles.
As Dino moves to get more of the sun's rays, it will look as though the DinoBot is sunbathing. We will have created an autonomous robot, one that is powered from nature. We know you are asking yourself: How much energy can we capture from nature? That all depends, but it will always be more than if the DinoBot was deployed on mars.
LIGHTWEIGHT POWER SYSTEM
We can can increase the energy harvested, hence the energy storage density using a novel collection array and achieve greater than 1,000 watt hours per kilogram with significant endurance gains spanning weeks rather than days. This is something that the Centre for Defence Enterprise (CDE) are particularly interested in under their Small Business Research Initiative (SBRI) and for this reason we will not elaborate here on such development.
2004
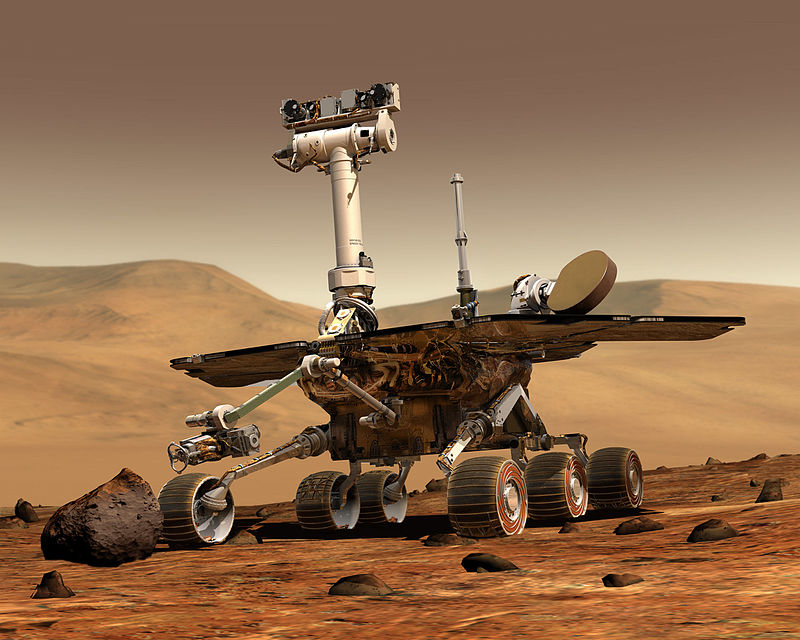
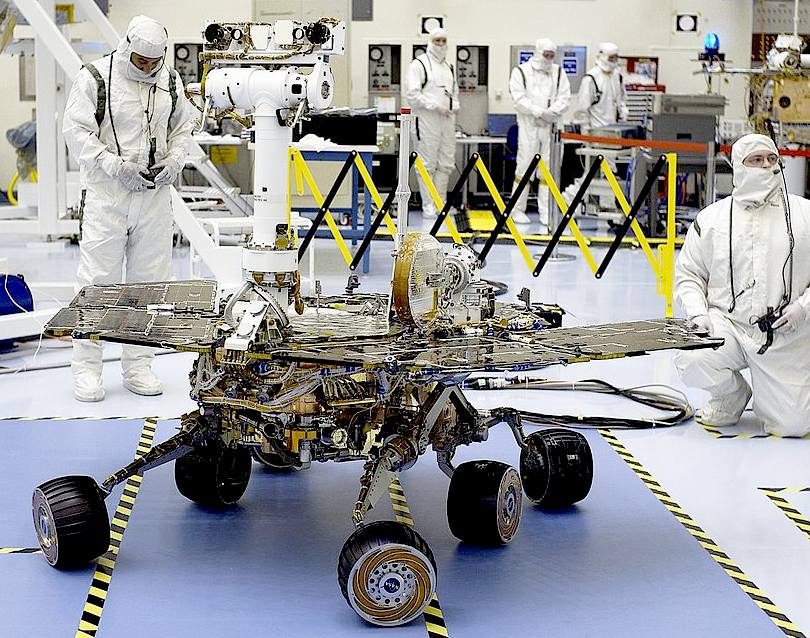
- SPIRIT MARS ROVER - Spirit, also known as MER-A (Mars Exploration Rover – A) or MER-2, is a robotic rover on Mars, active from 2004 to 2010. It was one of two rovers of NASA's ongoing Mars Exploration Rover Mission. It landed successfully on Mars at 04:35 Ground UTC on January 4, 2004, three weeks before its twin, Opportunity (MER-B), landed on the other side of the planet. Its name was chosen through a NASA-sponsored student essay competition. The rover became stuck in late 2009, and its last communication with Earth was sent on March 22, 2010.
2004
- OPPORTUNITY MARS ROVER - Opportunity, also known as MER-B (Mars Exploration Rover – B) or MER-1, is a robotic rover active on Mars since 2004. Launched on July 7, 2003 as part of NASA's Mars Exploration Rover program, it landed in Meridiani Planum on January 25, 2004, three weeks after its twin Spirit (MER-A) touched down on the other side of the planet. With a planned 90 sol duration of activity, Spirit functioned until getting stuck in 2009 and ceased communications in 2010, while Opportunity remains active as of 2016, having already exceeded its operating plan by 11 years, 268 days (in Earth time). Opportunity has continued to move, gather scientific observations, and report back to Earth for over 47 times its designed lifespan.
2012
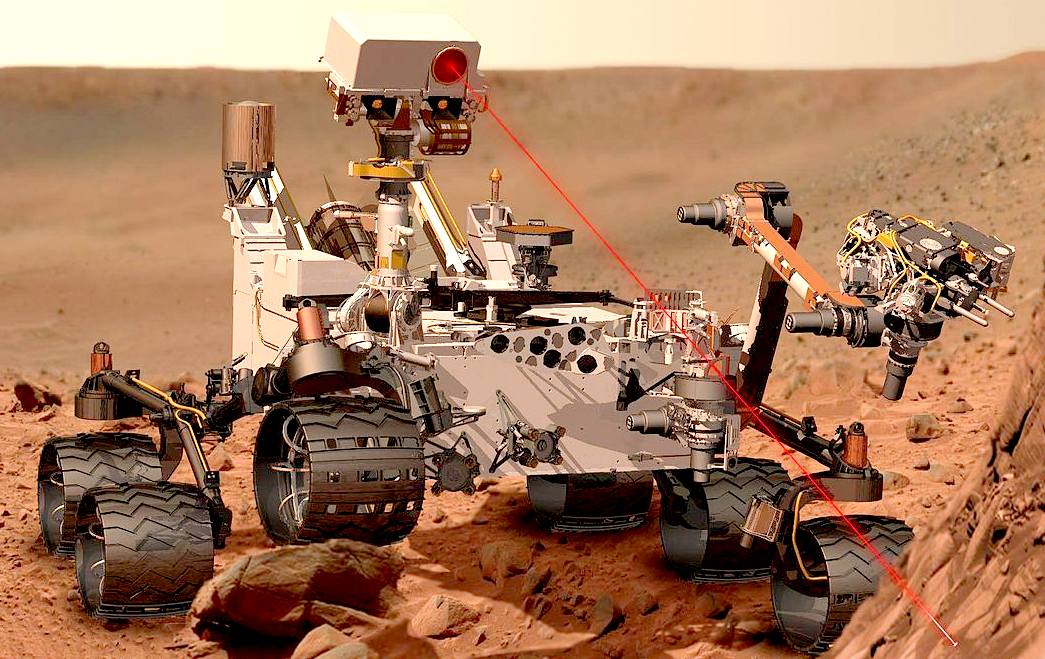
- CURIOSITY MARS ROVER - Curiosity is a car-sized robotic rover exploring Gale Crater on Mars as part of NASA's Mars Science Laboratory mission (MSL). As of January 19, 2016, Curiosity has been on Mars for 1227 sols (1261 total days) since landing on August 6, 2012.
INCOMING SOLAR RADIATION (INSOLATION)
We can fit around 0.33m2 of solar cells onto an (ant form) DinoBot. The incoming solar radiation at sea level on a clear day is roughly 1000 watts a square meter after it punches through the atmosphere and is scattered. In space where the radiation from the sun has no atmosphere to push through, the energy available to harvest is around 1350 watts a square meter. With an efficiency of 21% on earth, that would be 210 watts a meter, or 70 watts for Dino to munch on over a period of about 8 hours = 560 watt/hours a day - or .56kW/hr a day. That is enough to walk about 1.25 miles or 2 kilometers.
Compare that to the 200 meters (660ft) a day of the Mars Rover, 'Curiosity,' and that does not sound too bad. Especially as the Curiosity has a nuclear power pack. Then again the 'Sprit' Mars Rover could manage only 2.40 meters a day average (12 meters day max) during a Martian 4 hour day - so 24 meters back on planet earth.
One of the main reasons that solar powered Mars Rover performance is so poor, is that the planet only receives 590 watts per square meter, or about 44% of the earth’s solar irradiance before atmospheric scattering, where Mars is 228 million kilometers from the sun and our earth is just 150 million kilometers away. Pro rata that works out at 59% because mars has a thinner atmosphere (0.06%) than our planet - and no chocolate coating, unlike the famous butter-cream candy snack bar.
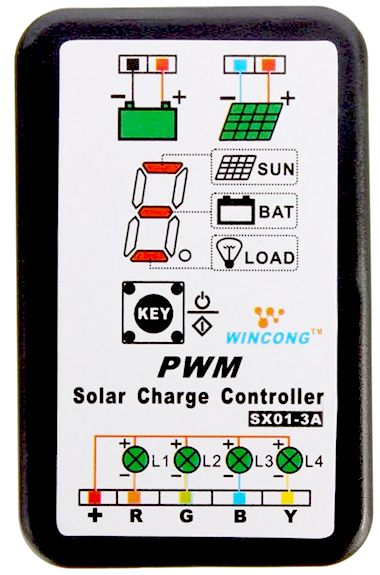
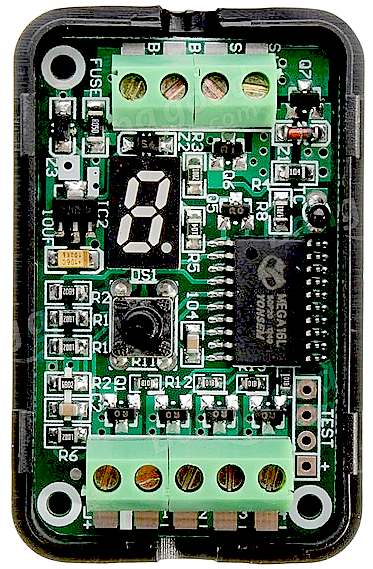
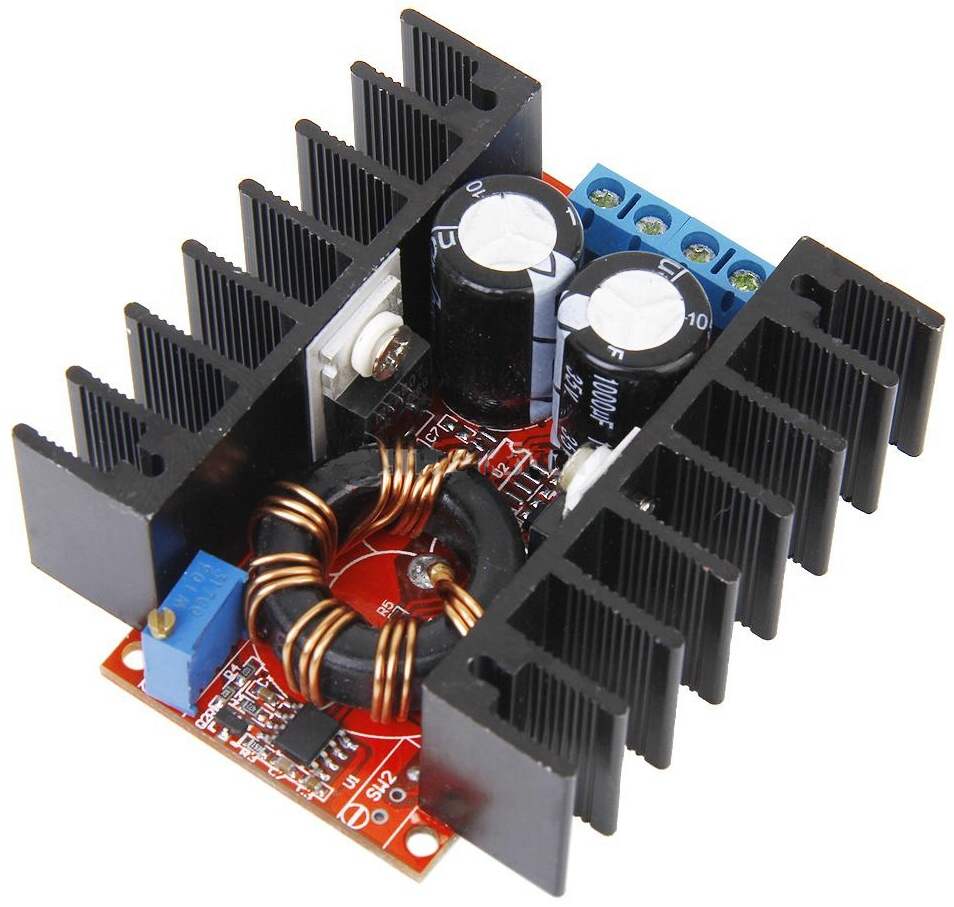
SOLAR PANEL CHARGE REGULATORS & DC to DC CONVERTERS - The above is a selection of electronic controllers that will ensure your battery is charged correctly by your solar panels. The lower right is a DC to DC converter to boost voltage should that be needed.
REGULATING THE CHARGE OF LITHIUM BATTERIES
Lead acid batteries are relatively tolerant when it comes to charging from solar panels, lithium batteries are not. Lithium cells need to be charged at precise levels and not to be discharged below a certain level, or the battery will become unusable.
LITHIUM POLYMER BATTERIES - There is no use capturing energy from nature if we are not able to store it. We are advocates of lead-acid gel cells and lithium polymer batteries. It all depends on what your priorities are. If you want to get up and running cheaply, then start off with gel cells. If you want a bit more range and a longer lasting system, then go for lithium polymer.
SUN TRACKING SENSORS - Seen above are a variety of low cost digital solar tracking boards, from £16 - £25 for single axis solutions - plus postage and packing. And some higher output analog circuit boards from £18 - £29. It is a simple matter to increase the amperage and/or voltage by using relays. It's also possible to use remote sensing heads that SBE sell as accessories. As you can see, all of these boards use LED photodiodes as the sensing medium.
ROBOTS CAN GO WHERE MAN CANNOT
But seriously, robots enable mankind to explore planets that as biological humans, we would be unable to contemplate. The space robots above may not look like humans or our DinoBot, but they rely on similar technology and working as a whole, extend man's ability to go where he might not otherwise survive for very long. As Captain Kirk would say in Star Trek: To go where no man has gone before, and yes, space is the final frontier.
LINKS & REFERENCE
Steatite
UK Ltd/ RE UK Simple Analog Solar Tracker Concept Techswarm 2015 May 20 ants colour vision may help march http://www.techswarm.com/2015/05/ants-colour-vision-may-help-march.html http://www.reuk.co.uk/Simple-Solar-Tracker-Concept.htm http://www.ksb.com/giw-en/
LEFT - Movie idea, lurking beneath the Antarctic ice is a discovery that scientists will die for. This story is now the subject of a low budget trailer to be produced mostly in the UK. The promoters are looking for backers. The UK will contribute 20% toward production costs. Roughly 60% of a low budget film may be pre-sold as distribution rights, leaving 20% finance to source. The deal is that investors recover 120% on their project stake within 12 months of shooting, with an income stream thereafter from networks and merchandising. Producers and directors please take note that there is a significant audience for well made movies of this genre. Look at what happened when they remade Godzilla. RIGHT - 2015 scifi action movie from the Marvel graphic novels.
A Sectasaur™ (thawed) - now on permanent display at Herstmonceux Museum, in Sussex, England.
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIOLOGY - BLACK BOX - COMPUTERS - ELECTRONICS - ENERGY - FRAME - HEAD - JAWS - JIMMY WATSON - KITS - LEGS - MECHANICS - MOTORS - MOVIE - PHOTOGRAPHY - RASPBERRY Pi - R/C DRONE - SENTRY - SOFTWARE - SOUND PROOFING - SPEED - SUSPENSION - TAIL - WEAPONS - WARGAMING
DINOSAURS - DOLPHINS - HUMANOIDS - RAYS - SHARKS - WHALES
ARDUINO - ARM HOLDINGS - BEAGLEBOARD - MBED - PCBS - PICAXE - RASPBERRY PI
|
||
|
This website is Copyright © 2024 Bluebird Marine Systems Limited. The names Bluebird™, Bluefish™, Miss Ocean™, SeaNet™, SeaVax™ are trademarks. All other trademarks are hereby acknowledged. The design of the Robot Ant on this page is design copyright © December 15 2015, all rights reserved - Jameson Hunter Ltd. IMPORTANT NOTE: Under no circumstances may our products, or those of Jameson Hunter Ltd, be used by any military or law enforcement organization, for any warlike, combat, or peacekeeping crowd control purposes. Anyone purchasing one of these units will be required to sign a binding undertaking (Deed) to that effect. Any unit found to have been purchased by proxy, will be confiscated, along with civil remedy in respect of breach of contract, that all parties in the chain will be vicariously liable for - to include damages for vehicles developed from our designs without our consent - and possible fraud issue from the deception. In addition to copyright theft, the law of passing-off applies.
|