|
GIANT ROBOTIC ANT - HEAD/NECK FRAME & JOINTS
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIOLOGY - BLACK BOX - COMPUTERS - ELECTRONICS - ENERGY - FRAME FORMICARIUM - HEAD - JAWS - JIMMY WATSON - KITS - LEGS - MECHANICS - MOTORS - MOVIE - PHOTOGRAPHY - RASPBERRY Pi R/C DRONE - SENTRY SOFTWARE - SOUND PROOFING - SPACE ROVERS - SPEED - SUSPENSION - TAIL - UKRAINE DRONES - WEAPONS - WARGAMING
|
|||
|
EIGHTH WONDER - As they scurry around at our feet, we take nature's engineering masterpieces for granted, much as we take our own intelligence for granted.
The neck joint of the ant is one of the strongest in the animal kingdom, able to take a strain equivalent to several thousands times the mass of the insect's body. The head of any animal is the most important part of the body because it contains the brain. That may not be true of robots where the computers making decisions could be mounted anywhere, but even on robots many essential sensors for environmental awareness are in the head, such as the eyes (cameras) and ears (microphones).
In our case the neck joints are required to lift the weight of a man or woman and be efficient when the robot is in sentry mode, harvesting solar energy and tracking the sun.
We pride ourselves on the ability to recycle commonly used products that are mass produced, into something completely different. It means that something most people would scrap, we give a new lease of life. This skill is especially important during the conceptual design stage, when the ability that all children have to play and experiment very often works to take an idea forward and prove a concept.
So, keep a few old gas cylinders about and don't throw away an old push bike that has useful parts on it.
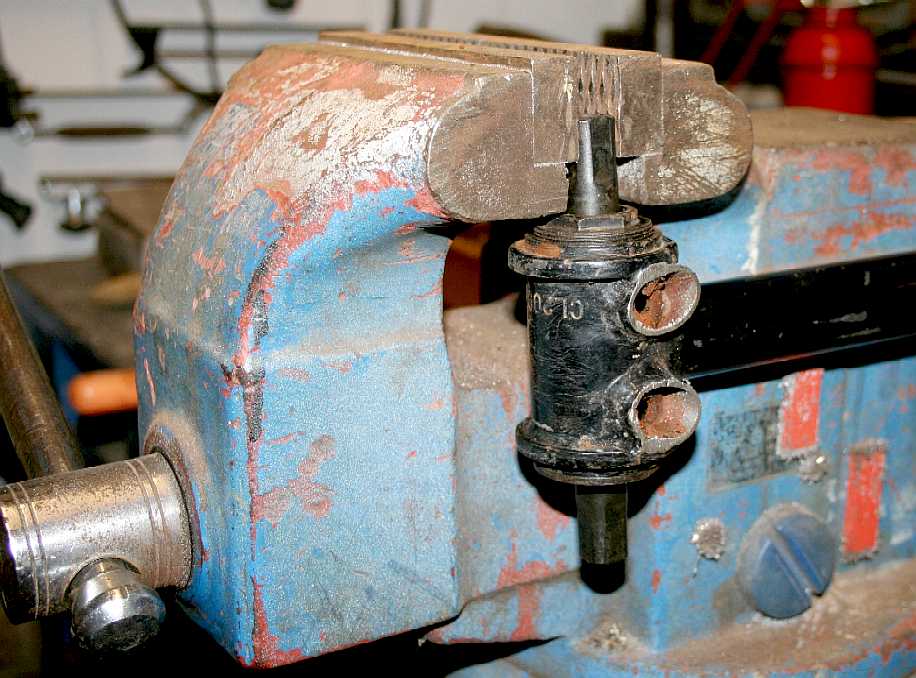
RECYCLE - This is the crank bearing from a bicycle that is the perfect size for one of the head swivels and can take heavy loads with a relatively long service life. It needs minor modification for our purposes, including cutting the shaft down, re-threading and removal of all extraneous tubing. Then we need to make a strong 'U' bracket to mate with the bearing below - and put a swivel joint on the other end of what was the downtube.
RECYCLE - The gas that is supplied to us in disposable cylinders for welding is also a source of reasonably thick wall steel that is curved, so is ideal for making parts, rather than being thrown out. Making sure that the CO2 is exhausted, we cut one end off a cylinder with our trusty hacksaw.
RECYCLE - Inside you will find a small amount of very fine rust powder, but also that the steel is most useable.
RECYCLE - Having marked out the section you need, cut the cylinder along its length and again to get a semi-circle of steel. In this case we wanted a yoke plate that curved around the main head bearing, so keeping the distance between one bearing plane and the 90 degree opposite - as close together as possible.
Ants are one of the most fascinating and extraordinary organisms on Earth. The neck joint is a complex and highly integrated mechanical system. Ants carry loads in their mouthparts, transferred through the neck joint to the thorax, and distributed over six legs and tarsi that anchor the insect to the supporting surface.
OHIO STATE UNIVERSITY STUDY 2014
To understand how the ant’s neck is capable of withstanding such great pressure, the Ohio State researchers developed 3-D models of the internal and external anatomy of an Allegheny mound ant (Formica exsectoides). These were made by introducing X-ray cross-section images (microCT) of ant specimens into a modeling program
(ScanIPþFE) that assembled the segments and converted them into a mesh frame model of more than 6.5 million elements. The finite element analysis was then processed on the powerful Oakley Cluster, an array of 8,300 processor cores
(Intel Xeon) at the Ohio Supercomputer Center.
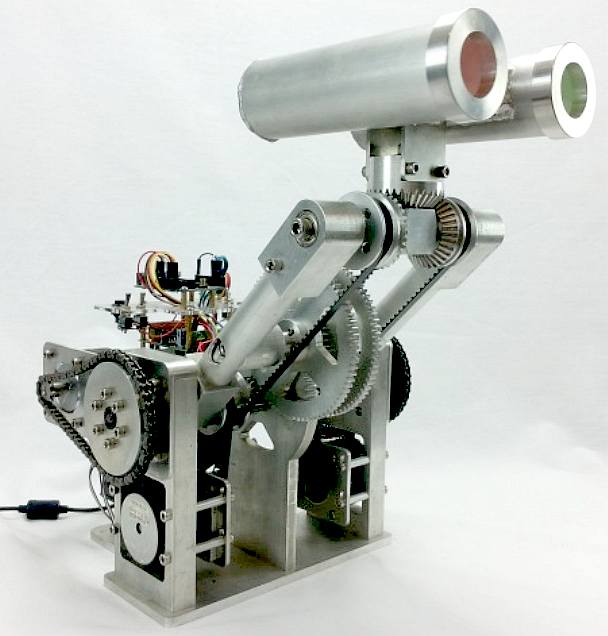
OPEN WIDE - You can see from the CAD plot above that the jaws open to 19" (490mm) from a 10" (250mm) input lever - almost a 50% mechanical disadvantage. In other words we've had to revise the ratios a little. We cannot make 60 pounds (27kg) of closing force at the tips without introducing more reduction gearing. Inefficient though it may be, our bargain servo will drive a 14mm x 2mm screw thread into threaded swivel blocks on either inboard end of the jaws, via a 3:1 reduction, multiplying our 40 lbs of force x 3 (minus losses) to give around 120lbs (54kg) of crushing strength. Some of you may have noticed that the head articulation is exactly the same 3 axis arrangement as a human arm - from the shoulder to the elbow, though why all the fascination with humanoids when humans cannot perform anywhere near as well as other animals. Please note that this frame is Design Copyright and that this photograph is Copyright © Jameson Hunter Ltd 20 December 2015. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
RECYCLE - This is the rear arm suspension bearing (nylon) from the same bicycle. Both of these bearings needed servicing, but will take the stresses of lifting a human in the jaws of the robot. We'll be sourcing new bearings for our kits from local engineering shops and overseas, rather than tool up to produce everything in our workshops. We'd prefer to keep production closer to home, but how can anyone compete with Central European and Asian prices with English business rates closing down small entrepreneurs before they can begin. The UK is not geared up to be a manufacturing nation any longer - though taking a lead in the industrial revolution. Fortunately, we do have design and development skills with international export potential - and you don't need expensive premises to think - at least not just yet. Our present administration would probably tax thinking if they could find a way to measure it.
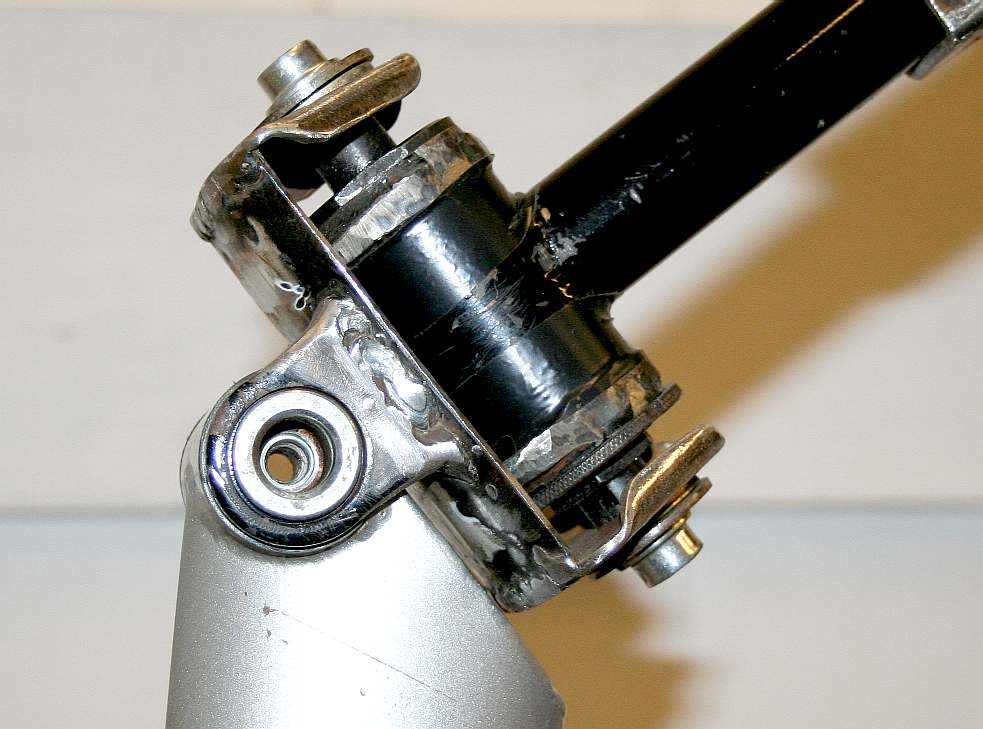
ROBOT NECK - The crankshafts ends have been cut down and re-threaded. This is difficult because the shaft is case hardened - so we'd not recommend you attempt modification. We needed to use the chop saw and angle grinder to rework this bearing for our vertical movement. Don't forget to disassemble the bearings and wash in thinners to remove any grit from the blacksmithing, then pack with fresh grease and adjust. We have built in provision for a swivel neck, but will only be using two of the three-axis design for the head. The next part to make is the bracket to join with the horizontal bearing. We may need to slightly alter the angle of neck bearing. We'll only be able to see if adjustment is necessary with the head artwork fitted - the movement needs to look authentic.
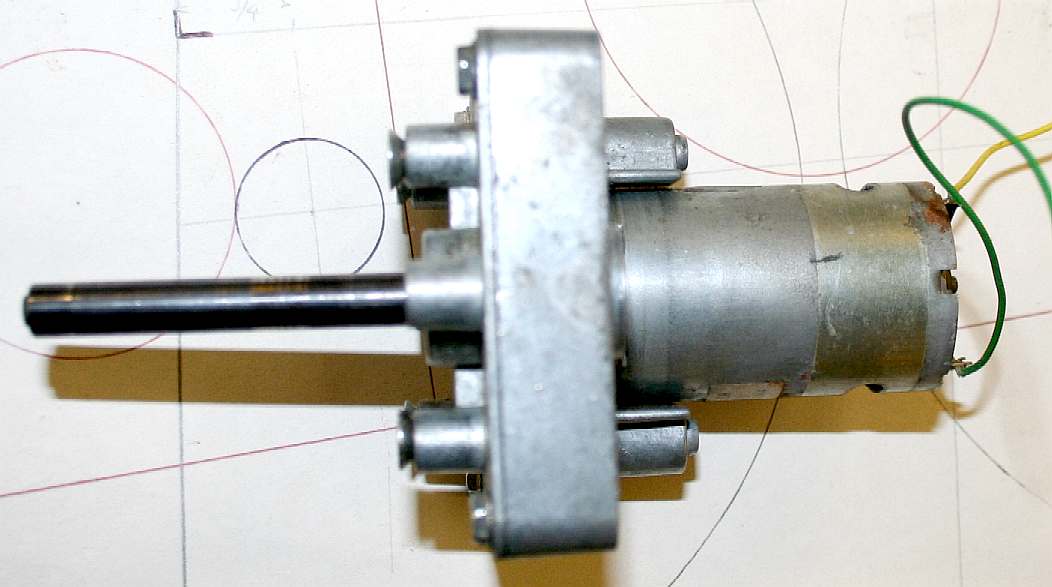
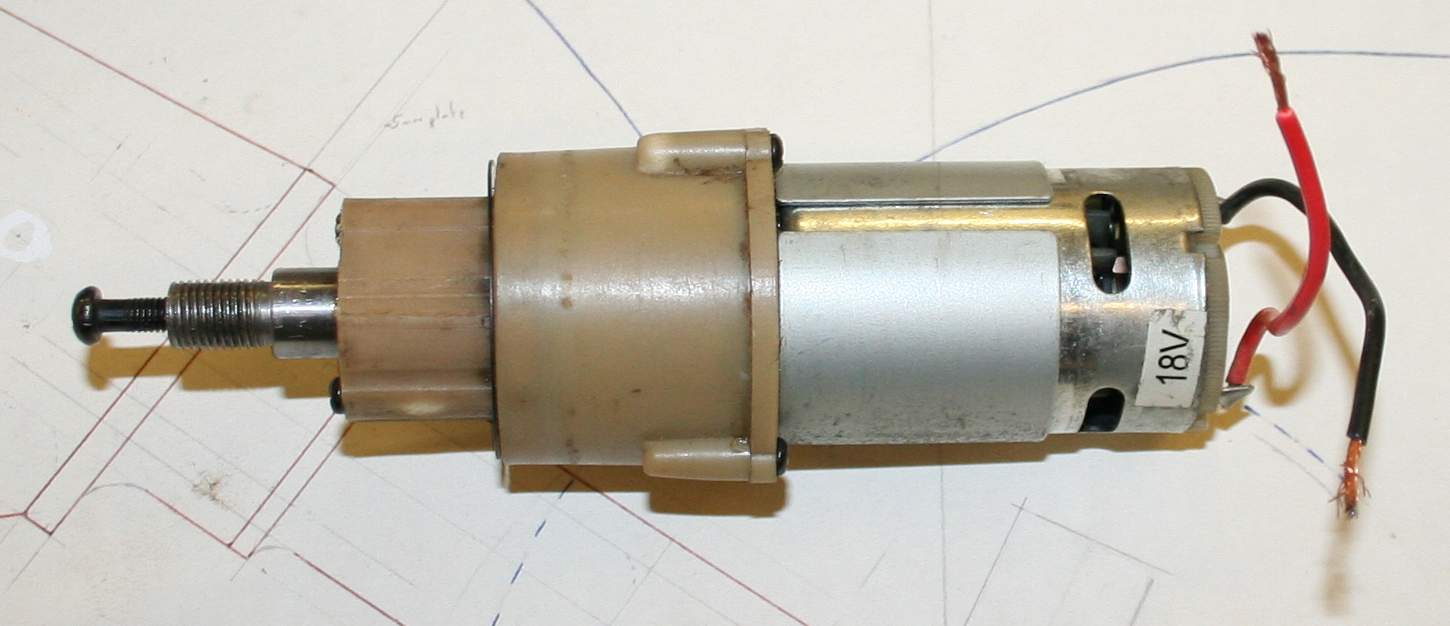
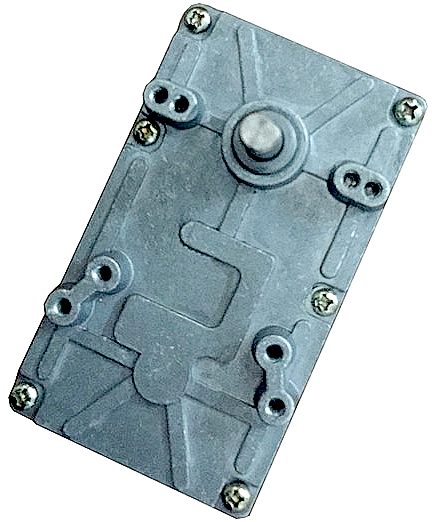
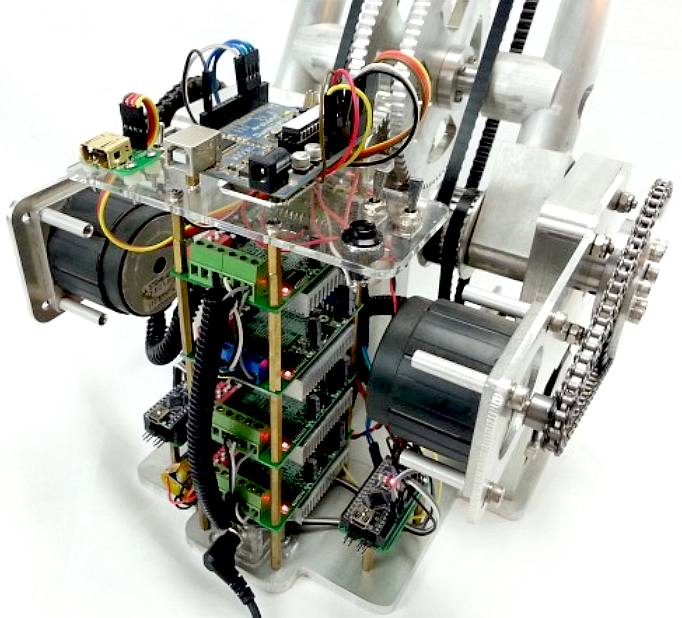
HEAD SERVOS - By comparison to the heavy duty RC servos used in most robot kits, the above units provide some serious grunt. They will take 12-24 volts without harming the motors - rpm is a product of voltage, so speed rises with voltage - something to remember when calculating the gearing. [LEFT] The motor is a Mabuchi 540 frame driving through a reduction gearbox with steel gears. Two of these will provide head left (shake) and right and up and down (nod) [RIGHT] This is a similar motor from a battery hand drill. The epicyclic gearbox has been hacked, removing the clutching spring and ball bearings that are used to dial in variable torque for driving screws, etc. You can lock the drive by securing the steel outer gear casing to the plastic drill casing. We've inserted a liner that is a tight interference fit. When taking these units apart, be sure to do so in a large bowl or other contained area, or you will lose some of the ball bearings from the front thrust bearing. Clean and re-lubricate on re-assembly.
HEAD DUTY GEARBOX - The internals of the head/neck servos. Note the steel gears that start at the motor with fine teeth, getting progressively more coarse during the three stages of reduction gearing until the output shaft, and the large phosphor bronze output shaft bushes that have been packed with molybdenum disulphide grease to prolong service life. To extend working life even further and improve efficiency, you would need to seal the casing and use a good quality gear oil in place of grease. Grease at low temperatures is thick enough to cause high drag. Please note that this photograph is Copyright © Jameson Hunter Ltd., 2 January 2016. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
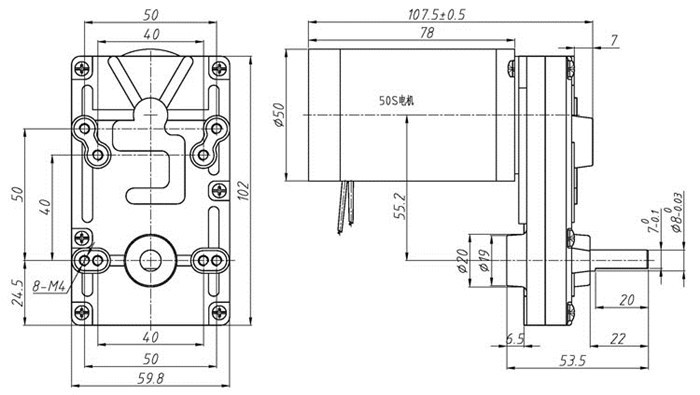
TYHE GEARBOX/MOTOR - These motor/gearbox units from Whenzhou Tyhe Motor Company in China may offer a low cost and reliable high output solution.
HEAD & JAWS - The head and jaw parts placed in roughly the right position. The neck bearings on the right need to be joined (welded) and mounts made for all three of the servos. The jaws (shown here as a cardboard pattern) need to be made in steel and composites. At the moment we're using 18mm spherical rod ends for the jaw main bearings to cope with 120 lbs of closing power and the ability to lift a person into the air. There are a lot of levers and control rod couplings to make - and some more mountings that sit on top of the head frame, for the antenna. The jaw motor drives a threaded bar that opens and closes the mandibles, further reducing the drive ratio, and so increasing closing torque. Please note that this frame is Design Copyright and that this photograph is Copyright © Jameson Hunter Ltd 2 January 2016. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
BONE YARD - The main components of the neck joint before the all important central plate, or yoke, is inserted between hinge axis and welded to the hinge plates of the head frame (left). In automotive terminology such 90 degree opposites are called universal joints. We'll be using custom made (heavy-duty) bearing blocks on production models.
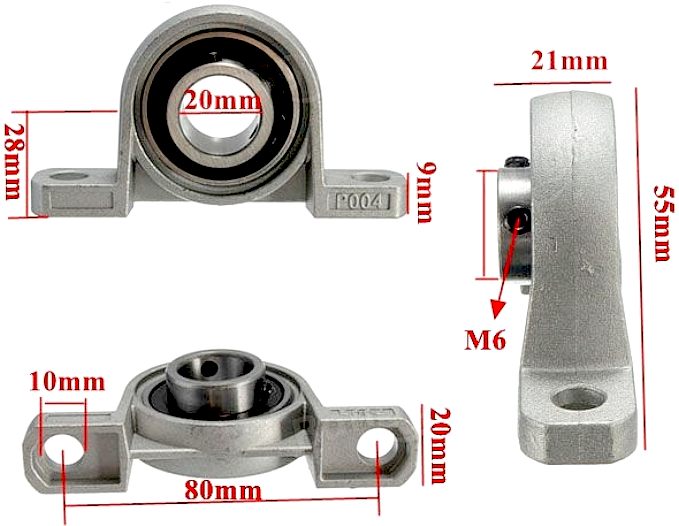
CHASSIS DESIGN - We'll be using 15, 20 and 25mm ball-bearing (pillow mount) blocks in future production DinoBots. A 25mm shaft can carry a significant load. Pillow mounts allow for and cure some misalignment in that they are self aligning. This particular brand is also lubricated for life and sealed against dirt ingress. Replacement for repairs is a simple matter, should a robot see that level of use.
NECK JOINTS - Coming back to the neck joint, we need to make two steel plates to bolt to and come off the modified crankshaft bearing. Mark the outline of the plates in felt marker and scribe in the centers, then centre punch. Please note that this frame is Design Copyright and that this photograph is Copyright © Jameson Hunter Ltd 28 January 2016. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
NECK JOINTS - Use a pillar drill to take the holes out to 15mm. These round holes need to be squared a little to mate with the bicycle crankshaft. Note how the surface rust makes the raw material look as though it should be scrapped. When in fact it is perfectly useable.
NECK JOINTS - Having drilled and shaped the holes to fit onto the push-bike crank, the rough blanks then need to be folded to give additional strength to the joint. The 15mm holes are no longer round, but tending to square. Please note that this frame is Design Copyright and that this photograph is Copyright © Jameson Hunter Ltd 28 January 2016. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
SHAPING - Use the coarse wheel on a bench grinder to pre-shape the radius of the steel semi-circle that was cut from the old gas cylinder. Wear a pair of gloves when grinding and protective glasses or goggles. Only rough shape, because when the three parts are welded together, the weld will take up a fair amount of play - and will need cleaning up anyway.
NECK JOINTS - Clean off the surface rust ready for welding. You must not allow rust or other contamination (inclusions) to weaken a weld. The preparation should be so that you can prime after welding, ready for a coat of protective paint. Please note that this frame is Design Copyright and that this photograph is Copyright © Jameson Hunter Ltd 28 January 2016. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
ASSEMBLY - Bolt an end plate onto each side of the crankshaft, sandwiching the gas-cylinder steel plate in between. The length of the joining plate needs to be cut accurately to be an interference fit. We used a 24 tooth hacksaw to cut the steel and a fine felt pen to mark it accurately. Our favourite marker pens are the fine tip Staedtler Lumocolor that seem expensive, but compared to other brands, give reliable results - and in the workshop quality matters. Take your time cutting. Use nice long smooth strokes and you'll be through in no time. If you rush it, you will go off line. We are now ready to tack weld the assembly. Please note that this frame is Design Copyright and that this photograph is Copyright © Jameson Hunter Ltd 28 January 2016. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
NO PEDALS - It may seem strange to see a bicycle crankcase without any pedals. Just wait until you see this head side-swivel bearing welded to the up-down bearing, that is the rear suspension bearing of the same donor bike. The point is that these bearings are strong enough and efficient enough for our purposes. SERVICING - Although the bearings have been cleaned and re-packed with molybdenum disulfide grease, to replace the bearings you will need to undo the two end bolts, drop out the packing washers and prise apart (open) the two end plates by about 3-4mm. This is by design to make a more robust unit. Please note that this frame is Design Copyright and that this photograph is Copyright © Jameson Hunter Ltd 28 January 2016. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
DINO ANT - This is the head of Dino ponera, one of the world's largest ants found in the Americas. The eyes are placed more forward than most modern social ants, but they are small compared to the Bulldog ant. Where the jaws are not so long or thin, the head has the ancestral characteristics of their Australasian cousins.
HEAD & NECK JOINTS - The head frame is now connected to the neck joints. The brackets are welded inside and outside to carry a medium sized stunt person of up to 11 stones (154 lbs or 69.9kg). The freedom of movement (angle) is directly down (vertical or 180 degrees), to almost directly up = 330 degrees, so giving us 150 degrees of movement. We'll not use all of this of course with the bodywork fitted. The head servos shown above will not be man enough stunt work, but the frame and bearings will cope - simply needing beefier drives, or (electro) hydraulic rams. In effect, the robot becomes a small engine hoist, replacing the engine for a human actor. This frame is Design Copyright and that this photograph is Copyright © Jameson Hunter Ltd 29 January 2016. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
NECK SLIDER - The steel tube that projects from the main frame to the neck joints is fitted with steel rings at the frame end and half way down the tube. This then forms the sliding surfaces for insertion into the box section steel tubing - that is then bolted in position. The reason for doing this, rather than just welding, is that we may replace the static neck with a ball-bearing swivel joint to give 3-axis movement.
NECK ASSEMBLY - In this picture you can see the neck tube inserted into the steel box section frame, and bolted in position. Please note that this frame is Design Copyright and that this photograph is Copyright © Jameson Hunter Ltd 25 January 2016. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
WALTER
11 2013 - By way of comparison in the approach to the project,
there is nothing recycled on this machine from Chris the Carpenter. Walter was clearly a
labour of love. The machine required hundreds of hours of work and a huge amount of maths and hand-written
notes in the programming. The stepper drivers were from Ebay. Two Arduino Nano's (each running Teacup firmware) control the steppers. One drives the neck (X/Y) and the second drives the main arm up and down (Z). A standard Arduino Uno feeds G-code via serial interface to the two Nano's. Also included was a Wii NunChuck connector that allowed Chris to drive the mechanics manually via joystick and tilt.
ARMY ANTS - Have a huge set of jaws and sometimes a thicker neck joint to prevent the head being severed from the body except under extreme circumstances. Almost everything about insect design is extreme, that's why we love them.
LINKS & REFERENCE
Science blogs photosynthesis 2009 September 5 why do only some ants sting The Guardian science 2015 May 13 great escape ant uses spring loaded jaws to jump away from predators http://letsmakerobots.com/node/38308 http://www.staedtler.co.uk/ https://en.wikipedia.org/wiki/Dorylus https://en.wikipedia.org/wiki/Army_ant http://www.wa4dsy.com/robot/drill-motor-hack http://dx.plos.org/10.1371/journal.pone.0124871 http://www.theguardian.com/science/2015/may/13/great-escape-ant-uses-spring-loaded-jaws-to-jump-away-from-predators https://en.wikipedia.org/wiki/Odontomachus_bauri https://en.wikipedia.org/wiki/Ant_venom http://www.stevebackshall.com/ http://scienceblogs.com/photosynthesis/2009/05/09/why-do-only-some-ants-sting/
LEFT - Movie idea, lurking beneath the Antarctic ice is a discovery that scientists will die for. This story is now the subject of a low budget trailer to be produced mostly in the UK. The promoters are looking for backers. The UK will contribute 20% toward production costs. Roughly 60% of a low budget film may be pre-sold as distribution rights, leaving 20% finance to source. The deal is that investors recover 120% on their project stake within 12 months of shooting, with an income stream thereafter from networks and merchandising. Producers and directors please take note that there is a significant audience for well made movies of this genre. Look at what happened when they remade Godzilla. RIGHT - 2015 Movie poster for Ant-Man, an adaptation from the Marvel graphic novel.
ENGINEERING DESIGN - Ants are fabulous fighting machines. Biological engineering is less of a compromise than man-made machines. The only advantage that machines have have that we build is that we can use any material we want to seek to compensate for design and manufacturing limitations.
WALTER
II - Is a superbly engineered static desktop companion robot from
Chris the Carpenter. This video shows how to turn solid billets of aircraft
grade alloy into bevel gears and belt drives. The approach is 100% not KISS
compatible, but the end result is worth looking at and a thing of beauty.
Nice one Chris.
JAMES
- Is a 3 axis robot head that uses steel (bowden) cables in tension
acting against a central flexible stem that is incompressible.
RT4
- This is also a 3 axis robot head but using pushrods in slider bearings.
This movement adds rotation to increase the range of movement to look quite
believable.
A Sectasaur™ (thawed) - now on permanent display at Herstmonceux Museum, in Sussex, England.
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIOLOGY - BLACK BOX - COMPUTERS - ELECTRONICS - ENERGY - FRAME - HEAD - JAWS - JIMMY WATSON - KITS - LEGS - MECHANICS - MOTORS - MOVIE - PHOTOGRAPHY - RASPBERRY Pi - R/C DRONE - SENTRY - SOFTWARE - SOUND PROOFING - SPEED - SUSPENSION - TAIL - WEAPONS - WARGAMING
DINOSAURS - DOLPHINS - HUMANOIDS - RAYS - SHARKS - WHALES
ARDUINO - ARM HOLDINGS - BEAGLEBOARD - MBED - PCBS - PICAXE - RASPBERRY PI
|
|||
|
This website is Copyright © 2024 Bluebird Marine Systems Limited. The names Bluebird™, Bluefish™, Miss Ocean™, SeaNet™, SeaVax™ are trademarks. All other trademarks are hereby acknowledged. The design of the Robot Ant on this page is design copyright © December 15 2015, all rights reserved - Jameson Hunter Ltd. IMPORTANT NOTE: Under no circumstances may our products, or those of Jameson Hunter Ltd be used by any military or law enforcement organization, for any warlike, combat, or peacekeeping crowd control purposes. Anyone purchasing one of these units will be required to sign a binding undertaking (Deed) to that effect. Any unit found to have been purchased by proxy, will be confiscated, along with civil remedy in respect of breach of contract, that all parties in the chain will be vicariously liable for - to include damages for vehicles developed from our designs without our consent - and possible fraud issue from the deception. In addition to copyright theft, the law of passing-off applies.
|