|
GIANT ROBOT ANT - SPEED OVER ROUGH TERRAIN
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIOLOGY - BLACK BOX - COMPUTERS - ELECTRONICS - ENERGY - FRAME FORMICARIUM - HEAD - JAWS - JIMMY WATSON - KITS - LEGS - MECHANICS - MOTORS - MOVIE - PHOTOGRAPHY - RASPBERRY Pi R/C DRONE - SENTRY SOFTWARE - SOUND PROOFING - SPACE ROVERS - SPEED - SUSPENSION - TAIL - UKRAINE DRONES - WEAPONS - WARGAMING
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
STREAMLINED - Below 20mph aerodynamic drag is not a major factor for any object moving through the air. Above 50mph air drag becomes a problem. There is no point worrying about this for Mr Ant. On this page we are talking about the running land speed record for robots. The Cheetah from MIT uses an off-board hydraulic pump as the power source. That is like fuelling an electric land speed record car with a cable - a cheat - and so disqualifies Boston Dynamics as a potential title holder. That said, we greatly admire their efforts. A proper record must be made by a robot that has the power source onboard for the duration of the course.
CHRISTMAS GIANT ROBOT ANT PROJECT - SPRINTING SPEED
It is the dream of many a military strategist, to have at their disposal a machine that has the ability to scale rocky terrain at speed. Tracked vehicles fail this requirement miserably. If this could be achieved, human soldiers might one day be replaced.
The fastest human foot-speed on record is 45.7 km/h (12.4 m/s or 27.78 mph), seen during a 100 meters sprint (average speed between the 60th and the 80th meter) by Usain Bolt. Maximum human sprint speed is strikingly slower than that of many animals. Compared to other land animals, humans are exceptionally capable of endurance, but exceptionally incapable of great speed. Even the domestic cat may reach 48 km/h (30 mph).
In our robot hexapod we also want high speed over rough ground. DARPA has been working on this problem for many years and now have the Cheetah qudruped robot that can manage 10mph and jump over obstacles un-tethered. This is a big improvement over Big Dog, that could only manage 4mph. We'll be happy if our robot can manage 10mph using a simple chain drive. We'd like to improve on that, but fear the time it would take to tune a suitable suspension may defeat us. As we are offering the basic machine as a kit, anyone with patience and a little inspiration might go for the walking/running land speed record. That said, we are not supplying the high-speed jointing with the basic kit, nor the performance chain drive.
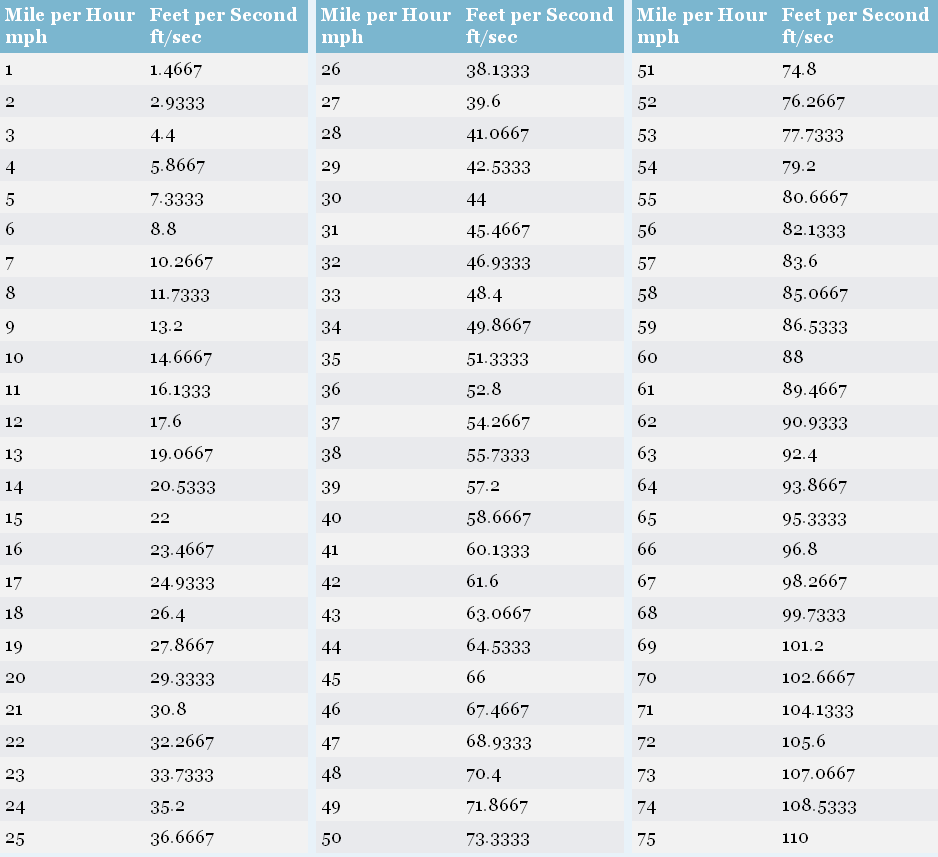
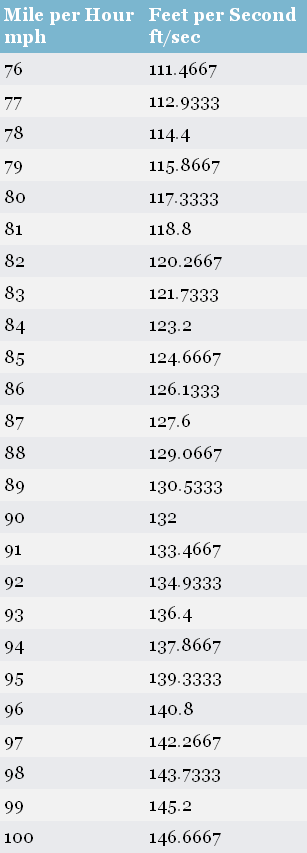
FT PER SECOND TO MPH - This is a handy reference table for design engineers.
It would be great if our robot could one day equal or exceed the running speed of a man. A man not a woman, because despite equality of the sexes, the female running record is substantially lower for biological reasons.
In order to achieve such velocities with a comparatively simple transmission, we cannot afford to waste energy with clumsy angles. We have six legs with which to spread the load during a walking cycle. Ideally, we'd like to keep three legs on the ground at all times: two on one side and one on the other - to make a steady triangle base. This will mean a succession of triangles, with as smooth a transition from one tripod footprint to another.
One of the best ways of making a machine efficient is to balance the movement and add a mechanism whereby the shocks from uneven ground may be absorbed. In some British cars between 1970 - 2000 this was achieved with hydrolastic suspension - where a road bump on one end of the vehicle was transferred to the other end using fluid to keep the vehicle horizontal (ish). The idea is to keep the robot level so as not to waste energy climbing peaks and surfing troughs, that might equate to a bobbing motion, rather than a linear transit.
SEQUENCING - This table is only included to show how complex electrical switching can be compared to mechanical timing.
The suspension has to be geared to the optimum rotational speed of the legs. Any imbalance will mean efficiency losses. Our legs need to be balanced against another leg doing the opposite and weighing the same - like a counterbalance - in a reciprocating petrol engine. The legs need to be as light as possible to reduce losses in lifting and lowering and return on the empty stroke, ready for the power stroke.
You can see how complicated a hydraulic system might be from the table above giving the sequence of valve timing, given that (hydraulic) muscle control of this order should in theory provide better control.
NOTE - Sprinting is a great way to burn off excess calories, it is held to be beneficial for anti-aging and longevity. For humans sprinting is an intense activity that works the entire body, it is an ideal exercise to boost HGH levels. Human Growth Hormone (HGH) is a hormone produced by the pituitary gland, responsible for tissue growth and regeneration. Many fitness experts believe that HGH production is a key factor for maintaining a youthful physique. Sprinting is a full body workout that sculpts the entire musculature.
Usain Bolt is currently the world's fastest man. He can sprint 100 (325 feet) meters in 9.58 seconds. If he could keep that speed up for a mile, he'd be doing 23.13 mph. He can't of course, much as we admire his fortitude.
CHEETAH
TIGER BEETLE - There is nothing obviously different in the layout of the legs of this animal, over the layout of the legs of an ant. It is though incredible that this creature is pro-rata faster than a cheetah.
HORSES
The American quarter horse has topped 88 km/h (55 mph), greyhounds can reach 70 km/h (43 mph), and the Mongolian Wild Ass has been measured at 64 km/h (40 mph). A horse gallop averages 40 to 48 kilometres per hour (25 to 30 mph). The world record for a horse galloping over a short, sprint distance is 88 kilometres per hour (55 mph).
WALKING v RUNNING
Walking is a low stress function, but running or sprinting is another matter - when balance and power delivery become important. All of a sudden the structure of an animal is everything, an ounce here and a feature there can make all the difference to life or death.
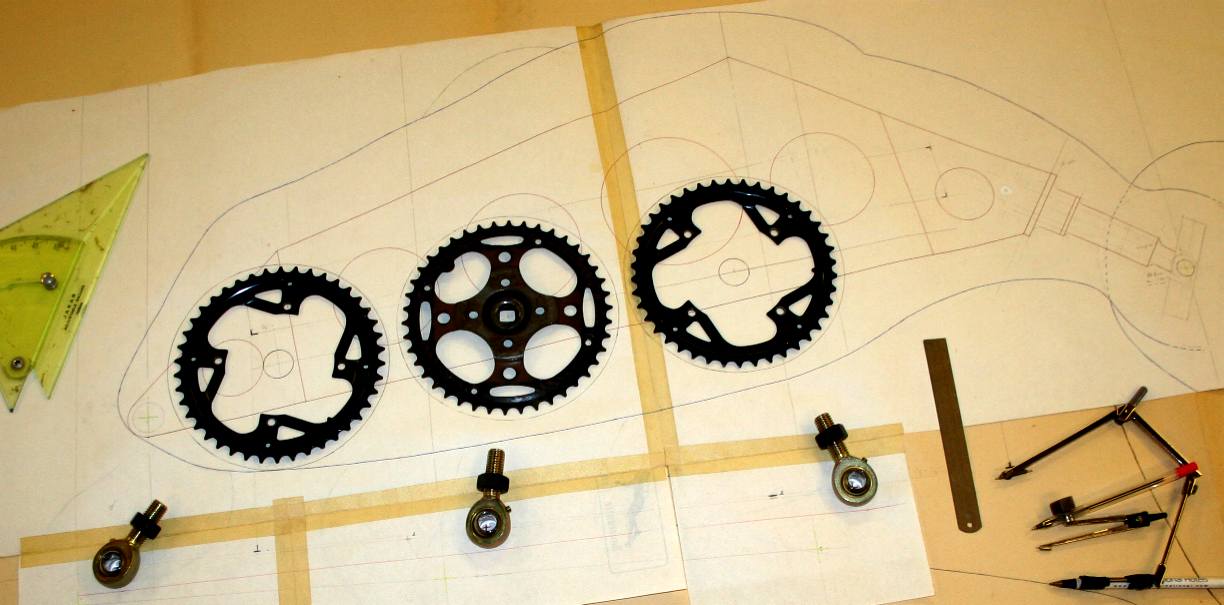
TECHNICAL DRAWING - Reducing the number of moving parts to the absolute minimum is one way of eliminating friction. In this picture some of the machine parts are placed on a working drawing to make sure the clearances are good. you can also see that the drive is relatively straight forward. Please note that this robot is Design Copyright and that this photograph is copyright © Jameson Hunter Ltd 2015. You will need permission from Jameson Hunter to be able to reproduce it.
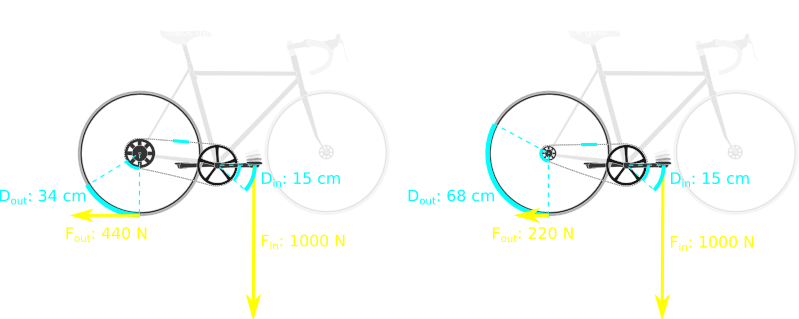
LEVERAGE - [LEFT] the gear is low (1st) providing good acceleration and traction up hills. [RIGHT] the gear is high (5th) providing a higher speed, having accelerated through the gears. A bicycle increases the effective range of a human by a factor of six.
DISTANCE TRAVELED = ENERGY
Walking takes energy, or power, in this case energy stored in a battery in electrical form. We convert that energy into movement across the ground with each stroke of the legs. One stroke equals one foot moved forward, approximately. This ratio is up to the designer. In our case, we are constrained by the design of nature (the ant), that gives us an envelope within which to do our best.
We can measure the energy stored and work out the energy needed to walk because we know that one horse can lift 550lbs, one foot in one second. We also know that 746 watts of electrical energy is equivalent to one horsepower. From this basic information we can calculate the energy in watts we need to walk at a given speed and convert that to horsepower for non-engineers to have a handle.
Energy E in joules (J) is equal to the power P in watts (W), times the time period t in seconds (s): E(J) = P(W) × t(s). 1 joule is equal to 1 newton meter, or 0.737562149277 foot-pounds of force, or one foot-pound force = 1.35581794833 newton-meters.
Pounds or Newtons of force need to be qualified to know that a machine is powerful enough to do the job it is designed for. But on this page we are concerned with running - and for sprint calculations we simply need to know what weight we are moving and how fast we want it to travel. Then we need to know that our mechanical geometry will allow us to achieve that.
WAIT FOR ME - The running cycle (stride) of the Cheetah at full pelt is something like 20-22 feet. The whole structure works together to achieve converting muscle contractions into forward propulsion. It is a superbly balanced design of nature, needing to complete 5 cps (300 rpm) to achieve 70mph. MIT have a way to go to compete with this biological marvel - inspiration indeed.
The cheetah (Acinonyx jubatus) is widely acknowledged as the fastest living land mammal, capable of speeds up to 29 ms−1. The greyhound (Canis familiaris) has been selectively bred for high-speed locomotion yet can only attain speeds of 17 ms−1 during a race, despite both animals having a similar mass and gross morphology. The cheetah's limb bones are also proportionally heavier and have a larger mid-shaft diameter, suggesting that they are suited for resisting larger forces.
RUNNING CYCLE
If one walking cycle, or revolution moves our robot forward one foot, then to achieve 10 mph we'd need the legs to reciprocate 15 times a second - and 22 times a second for 15mph. Increasing the leverage ratio to 1.5 feet per stroke would reduce the cycles per second (cps) by 50%. Then 15mph would require 15 cps. Increasing the ratio to 2.0 feet per stroke would mean 11cps for 15mph. That would be convenient for our calculations, but difficult to achieve in the space we are working within. Difficult, not impossible. It's all down to cost. We are staying with one foot per walking cycle for now; aiming for 1.5 and then 2.0 feet per cycle. The scale of this robot was chosen many years ago for this reason.
Most robots using a hexapod layout come across the problem of leg rotation, not as in a leg completing a stroke from fore-to-aft, but as in revolving so that the leg spins. The solutions that we have seen clutter the leg and add significant mass; preventing high speed. We have a solution that is compact and does not overly complicate the leg - and more importantly does not add mass to the leg. Unfortunately, we cannot tell you much about this because Jameson Hunter Ltd do not want to apply for a patent and incur substantial costs - and worse still - seriously short protection time (currently only 20 years). Instead, they have decided not to publish how the system works and not to sell the high speed system with kits. It's about time that patents were issued on a free basis (apart from admin costs) and their lifetime extended to match copyright protection - which is automatic and free. We have to admit that that JHL have a point.
As we have been saying, in order for a machine like this to work at 15cps (900 rpm), the mass of the legs needs to be as low as possible and extremely well balanced - or the vibrations would strain the structure (frame or chassis) to breaking point. A practical example of this is the road wheel of a car. Balanced, the ride is smooth past 100mph. Drive the same car with unbalanced wheels and speed can be limited to 40mph because of the discomfort and the vibrations be in danger of damaging the suspension. You need to experience this for yourself to understand.
The engineering challenge is to balance the movement of all six legs to achieve a comfortable action, and to enable this happy state, to keep the rotational mass down. Where we are starting with wood and steel for the legs, we may have to move to titanium and carbon fiber as performance increases.
FLEXIBILITY - This lady runner has an incredible length of stride and amazing flexibility, obviously trying to give Usain Bolt a run for his money.
ACCELERATION
When an object moves in a straight line with a constant acceleration, you can calculate its acceleration if you know how much its velocity changes and how long this takes. This equation shows the relationship between acceleration, change in velocity and time taken:
For example, a car accelerates from 25m/s to 35m/s in 5 seconds. In doing so its velocity changes by 35 - 25 = 10m/s. So its acceleration is 10m/s divided by 5 = 2m/s2 (or 2 meters per second for every second). We will though ignore acceleration, because the robot is not going to travel very fast it does not need to accelerate over a long time.
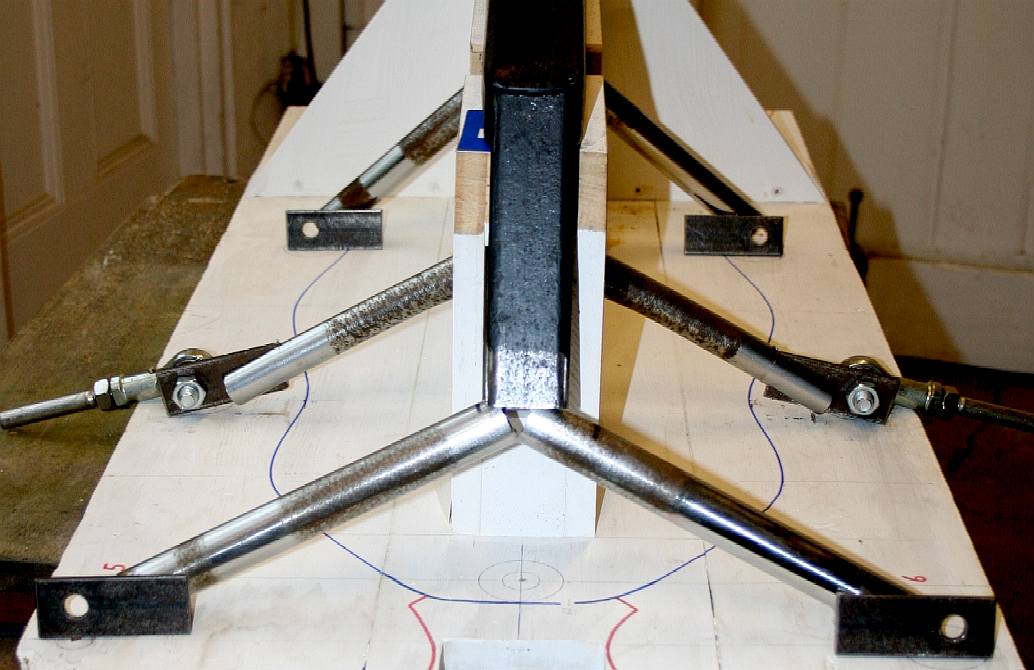
AXLE MOCK UP - December 27th - A balanced design will help to achieve high speeds in the field of operations. This may involve counterbalancing, and we may have to go over to titanium for the frame to cope with 15 running cycles per second (cps). Fifteen cps = 900 revolutions per minute (rpm). There is a lot of scope to strengthen this frame to cope with 900rpm. Insects evolved over millions of years, this design has evolved over a couple of weeks - so far. Please note that this frame is Design Copyright and that this photograph is Copyright © Jameson Hunter Ltd 20 December 2015. All rights reserved. You will need permission from Jameson Hunter to be able to reproduce it.
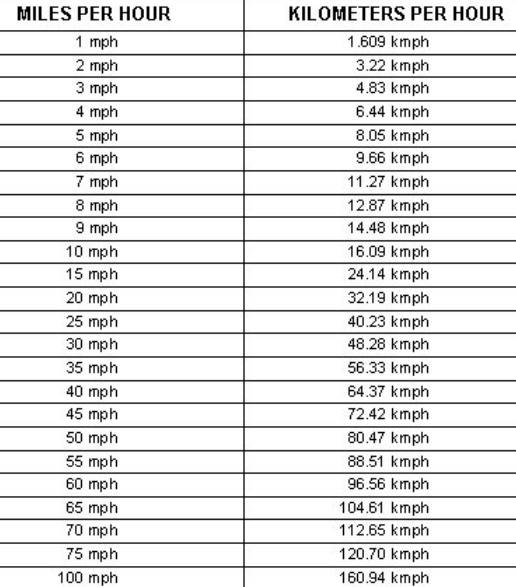
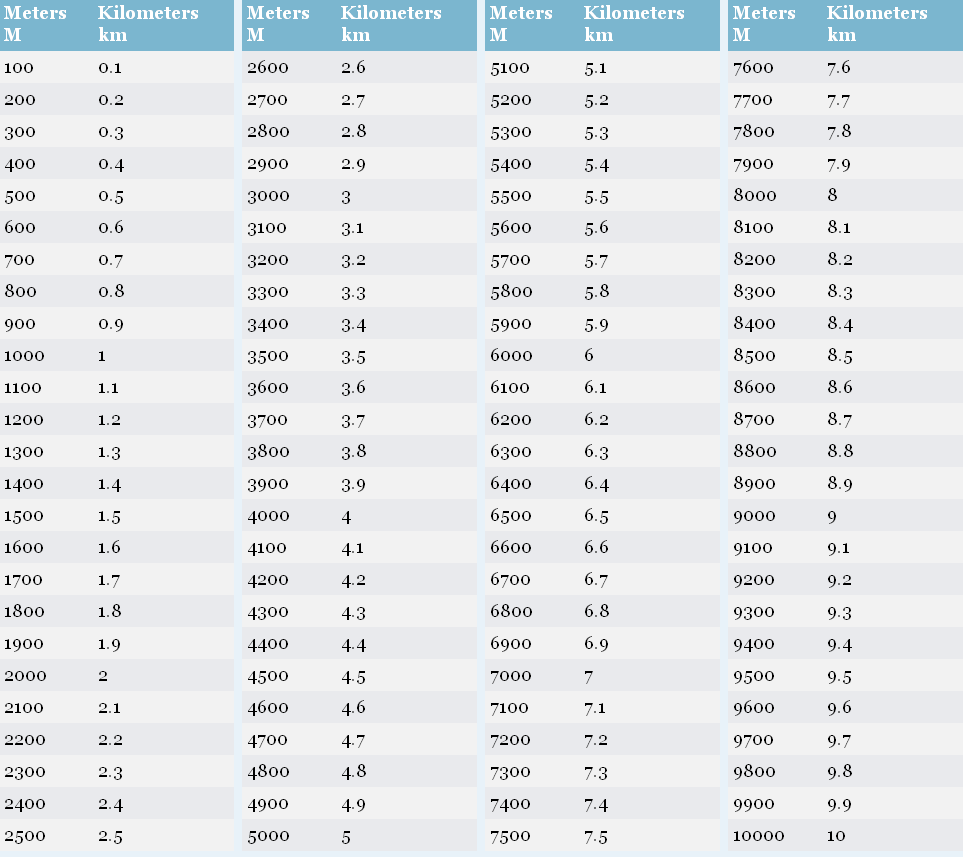
MORE USEFUL SPEED CONVERSION TABLES
LINKS & REFERENCE
Popular mechanics culture movies shark night 3ds predators blow jaws out of the water http://www.jandsfasteners.co.uk/ Chicago Zoological Park Illinois Brookfield Zoo Blog AL entertainment press register 2011 video giant_insects_exhibit Youtube Hexbug Vex robotic ant http://www.sussex.ac.uk/lifesci/insectnavigation/ http://journals.plos.org/plosone/article?id=10.1371/journal.pone.0122077 Dr Paul Graham http://www.sussex.ac.uk/lifesci/insectnavigation/ http://journals.plos.org/plosone/article?id=10.1371/journal.pone.0122077 http://www.gngebike.com/apps/webstore/products/show/3019663 http://www.electricscooterparts.com/bicyclesprockets.html https://www.aldebaran.com/ http://www.softbank.jp/en/ http://electronics.howstuffworks.com/gadgets/other-gadgets/stun-gun.htm http://lynchmotors.co.uk/ http://www.nestle.co.uk/ http://www.mufg.jp/english/ http://www.mitsubishielectric.co.uk/ http://www.mirror.co.uk/authors/olivia-solon/ http://www.maplin.co.uk/ http://www.fia.com/ http://www.budk.com/Stun-Guns-2974 http://www.autodesk.co.uk/products/autocad/overview https://en.wikipedia.org/wiki/Four-minute_mile http://www.royalmail.com/ http://www.bostondynamics.com/robot_bigdog.html http://www.discovery.com/ http://www.mirror.co.uk/news/technology-science/technology/robot-army-future---killer-5053344 https://www.youtube.com/watch?v=O5a7xab7WRY http://zjmy-lu.en.made-in-china.com/product/YKNnjrEkZWVS/China-800W-36V-W-Bracket-Electric-Motor-Kit-W-Control-Box-Throttle-F-Scooter-My1020.html http://www.nydailynews.com/news/national/don-sex-robots-expert-article-1.2362308 http://www.theguardian.com/technology/2014/dec/01/nestle-robots-coffee-machines-japan-george-clooney-pepper-android-softbank http://www.theguardian.com/world/2015/sep/28/no-sex-with-robots-says-japanese-android-firm-softbank https://www.czs.org/Brookfield-ZOO/Home http://www.exploreum.com/ http://blog.al.com/entertainment-press-register/2011/01/video_giant_insects_exhibit_ar.html https://en.wikipedia.org/wiki/Them! http://www.imdb.com/title/tt0047573/fullcredits/ https://en.wikipedia.org/wiki/Mechatronics https://en.wikipedia.org/wiki/Animatronics http://www.instructables.com/id/Simple-Animatronics-robotic-hand/ http://www.robots.nu/robot-animals/ http://www.knbefxgroup.com/
Tel:
01524 38 33 44 http://www.jandsfasteners.co.uk/
LEFT - Movie idea, lurking beneath the Antarctic ice is a discovery that scientists will die for. This story is now the subject of a low budget trailer to be produced mostly in the UK. The promoters are looking for backers. The UK will contribute 20% toward production costs. Roughly 60% of a low budget film may be pre-sold as distribution rights, leaving 20% finance to source. The deal is that investors recover 120% on their project stake within 12 months of shooting, with an income stream thereafter from networks and merchandising. Producers and directors please take note that there is a significant audience for well made movies of this genre. Look at what happened when they remade Godzilla. RIGHT - 1954 Warner Brothers movie poster for "Them." The plots are completely different, but the idea is similar, save that there is a degree more plausibility in the scale - and we hope, the ants to be used in the film.
A Sectasaur™ (thawed) - now on permanent display at Herstmonceux Museum, in Sussex, England.
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIOLOGY - BLACK BOX - COMPUTERS - ELECTRONICS - ENERGY - FRAME - HEAD - JAWS - JIMMY WATSON - KITS - LEGS - MECHANICS - MOTORS - MOVIE - PHOTOGRAPHY - RASPBERRY Pi - R/C DRONE - SENTRY - SOFTWARE - SOUND PROOFING - SPEED - SUSPENSION - TAIL - WEAPONS - WARGAMING
DINOSAURS - DOLPHINS - HUMANOIDS - RAYS - SHARKS - WHALES
ARDUINO - ARM HOLDINGS - BEAGLEBOARD - MBED - PCBS - PICAXE - RASPBERRY PI
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
This website is Copyright © 2024 Bluebird Marine Systems Limited. The names Bluebird™, Bluefish™, Miss Ocean™, SeaNet™, SeaVax™ are trademarks. All other trademarks are hereby acknowledged. The design of the Robot Ant on this page is design copyright © December 15 2015, all rights reserved - Jameson Hunter Ltd. IMPORTANT NOTE: Under no circumstances may our products, or those of Jameson Hunter Ltd, be used by any military or law enforcement organization, for any warlike, combat, or peacekeeping crowd control purposes. Anyone purchasing one of these units will be required to sign a binding undertaking (Deed) to that effect. Any unit found to have been purchased by proxy, will be confiscated, along with civil remedy in respect of breach of contract, that all parties in the chain will be vicariously liable for - to include damages for vehicles developed from our designs without our consent - and possible fraud issue from the deception. In addition to copyright theft, the law of passing-off applies.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||