|
SCORPION HK - SAM, SURFACE TO AIR MISSILES
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
PATENT PENDING - Two (port and starboard) batteries of Ship to Air missiles may be mounted fore and aft on Scorpion or Dragonfly HKs to provide a formidable defensive array of up to 32 missiles. When linked with Cruise missiles for attacking aircraft carriers, destroyers and the like, while also fending off attacks from hostile fighter planes (or drones) a small ship suddenly takes on the mantle of a much bigger naval craft - and being unmanned, presents a formidable (fearless) adversary, to any Navy that is still fielding crewed ships.
In the past ASVs or radio controlled drone craft were used by the navies of the world for target practice. It could be argued that the proposed role reversal, is far more sensible, in that warships that are manned today present unacceptable risks for any department of defense that cares about human lives, to keep on presenting them as potential target practice for the inevitable drone battleships that are due to hit the high seas within the next 5-10 years.
A military version of the Bluefish zero carbon cruiser (ZCC) is to have twin batteries of small SAM type rockets @ 1/20th scale, carried in fore (and/or) mounted swivel turrets - useful for tracking multiple targets. These turrets may rotate vertically to be able to launch a SAM in the general direction of a located enemy, such that seek time is reduced before a SAM's guidance system cuts in with a deadly response. For the development model we will be using cameras and lasers for targetting.
A Scorpion HK - fitted with 4 x SAM turrets (one per corner), each carrying 8 missiles (Rapier example), giving a battery of 32 rockets to fend off enemy aircraft. The micro battleship is also shown here with 4 Tomahawk cruise missiles in protected bays, and 4 x 21" torpedoes (that are not visible) - all drawn to scale - as a prelude to proof of concept. This original concept vessel is design copyright © BMS Ltd 2014. The technology is also patent applied for.
Being an unmanned drone, there is no need for crew quarters, provisions or other life support. In the event of a pirate ship coming too close, powerful warnings will be given, which if not heeded, will end in the vessel being sunk with a SAM. The term SAM is used, even where a missile is fired from the battleship toward another ship on the ocean surface = SSM. It might be an expensive exercise, but pirates will soon learn not to too try it on with a Scorpion HK, or develop Robo-phobia. RoboShips are about to come of age. Click on the CAD drawings below to see how to make a SAM turret for war gaming. Lock on!
Finally, the battleship also carries a submersible ROV that may be deployed from the mothership remotely, with other sensors to locate and clear mines. In tandem with military surveillance duties, the ship can sample and map the oceans all at the same time. That could save any navy a pretty penny - not to mention - that this vehicle is powered by energy from nature. So, no nuclear waste and no diesel smog.
Larger rockets at 1/20th will be incorporated as cruise missiles. These will be mounted under the solar decks and launched horizontally. Seek time is not so important where such missiles are guided to their warship targets some miles off, though could be used to destroy enemy submarines, if out of torpedo range.
The same model will carry 1/20th scale MK48 torpedoes, to be able to demonstrate firing and buoyancy compensation, using the active hull.
Normally, a ship that carries SAMs is considerably bigger than a Scorpion HK. Because there is no crew, there is no need for bunks, kitchens, entertainment, food, laundry, waste systems, etc. This reduced the mass of the vessel to all that is needed for a higher performance military vessel, just like the aerial drones that are used so effectively today. Of course, the only way to see just how effective such a naval drone might be, is to run simulations first of all, followed by real life trials. BMS can carry out the small scale trials and full scale trials of the base platform, but would need a military contractor as a partner (or end user) when testing weapons at full size.
1/5th and 1/10th SCALE MODEL UPSCALE
Models to 1/10th scale (5 meters or 16 feet) and 1/5th scale ( 10 meters or 32 feet) could be produced that would be useful oceanographic tools, and/or naval weapons. At the moment there is no funding available to us for such research.
WHAT'S SO SPECIAL ABOUT THE SCORPION & DRAGONFLY HKs?
Apart from the fact that once launched there are no fuel costs, the unique hull design provides a degree of flexibility that is unparallel in naval military history for such a compact craft - and here is why:
1. SAM MISSILES 3. TORPEDOES
5. SEANET
A fleet of Scorpion HKs (SHK) work together via a program that may be developed as a new tool for your Navy's anti-submarine and naval surface combat missions. Each SHK tracks its partner craft and can safely navigate among commercial shipping traffic as the convoy patrols sensitive choke points against an enemy fleet that is bound to have some tricks their sleeve.
The SeaNet gathers information of the opposition's movements for tactical analysis of the evasion techniques used by the enemy during peacetime and hostilities, and of course in storing data of successful naval engagements.
6. NUCLEAR FREE PERSISTENT PATROLS
The combination of solar and wind energy harvesting can provide sufficient energy to power the vessel at around 7-10 knots continuously, with a sprint speed of around 20 knots. That is not sufficient speed to run down a nuclear submarine with one craft, but a network of Scorpions in Seawolf formation might easily ensnare a submerged vessel. As each enemy submarine is taken out of the equation, the Seawolf pack might concentrate resources to locate and target the next submarine, etc. It's an adult game of Battleships with computers deciding the moves and robot ships carrying out the orders - under the supervision of human moderators.
7. ECONOMY
The basic hull and energy harvesting apparatus can be brought in well under $5m. See estimates below. To the platform cost must be added the weapons systems, which is where a naval combat ship can start to become expensive assets. Even at double this price, a Scorpion HK would still be a military bargain.
Launch of cruise missiles from a naval combat drone may be by using rocket launches as per the above example..
H. COSTING ESTIMATES FOR R/C MODEL SAM MISSILES @ 1/20TH SCALE
A naval version of the Rapier SAM system may provide the all round capabilities that BMS are looking for in a comprehensive Scorpion HK weapons system. It is important to be able to neutralize attacks from manned fighter aircraft, helicopters, cruise missiles and airborne drones. The Rapier system is only short range, so not particularly suited to pre-emptive naval engagements. We were though inspired by the design of this turret launcher.
NEWS OF OTHER SUBMARINE HUNTING SYSTEMS - AIRCRAFT
SUBMARINE INDEX
Alvin DSV - Woods Hole Oceanographic Institution Deepsea Challenger - Mariana Trench, James Cameron 2012 HMS Astute 1st of Class HMS Vanguard- Trident INS Sindhurakshak - explosion & sinking Littoral combat vessels Lusitania - Torpedo attack Nuclear submarines lost at sea Predator - Covert submarine hunter/killer Seawolf - Autonomous wolf pack deployment of Predator mini-subs Torpedoes - UUV anti submarine weapons Trieste - World record depth - Mariana Trench 1960 U20 - Kapitan Leutnant Walther Schwieger USS Bluefish WWI submarine USS Bluefish - Nuclear submarine USS Jimmy Carter - Seawolf class fast attack nuclear submarine USS Nautilus - 1st nuclear submarine & subsea north pole passage USS North Dakota - 11th Virginia class submarine USS Scorpion - Lost at sea with all hands
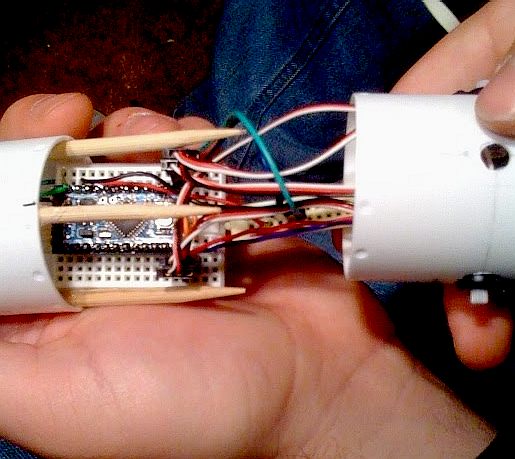
HACKERS: NAVIC and K.O.D. BUILD ARDUINO GUIDED ROCKET
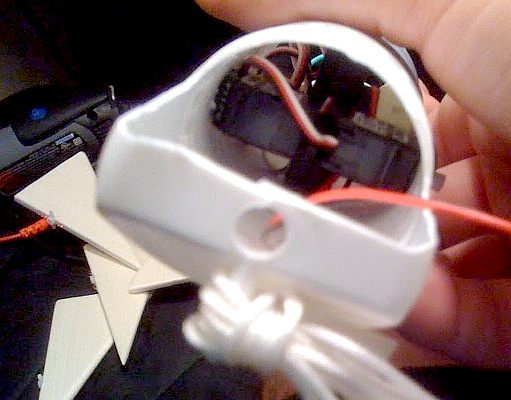
Hackers [Navic] and [K.o.D]
fitted an Arduino Pro Mini and an array of components into an off the shelf rocketry kit to create a guided model rocket, taking the whole idea of Arduino-based space technology to another level
On the left you can see the Arduino mini computer board and on the right, the micro servos that control the balsa wood fins. We agree that 2.9 seconds is not sufficient for control tests. Next time why not use ordinary fireworks type rockets as the propulsion system. They are cheaper and fly longer. Granted, that there may be more fiddling about. We are using off-the-shelf technology like this just to get a feel for firing rockets directionally - and safely - out at sea or on secluded waters. We'll leave the explosives part to the weapons experts.
This diagram is the basis of our actual test rigs, using skyflash rockets as the motors, modified of course with fins and more.
BLUEFISH DEVELOPMENT PROJECT INDEX A-Z
LINKS & REFERENCE
PT boat contra rotating electric torpedo The
Guardian June 2003 Terrorism David Fickling Aardvark
DIY cruise missiles Hackaday 2010 diy guided missile err model rocket Sites google airwavershr guided rocket https://sites.google.com/site/airwavershr/Home/guided-rocket http://hackaday.com/2010/08/03/diy-guided-missile-err-model-rocket/ http://www.theguardian.com/world/2003/jun/04/terrorism.davidfickling http://www.subcommittee.com/ http://www.rc-submarines.net/torpedoes.html http://www.pt-boat.com/torpedo/torpedo.html
SEANET™ DRONE - A hammerhead Scorpion HK combat warship - shown here fitted with 4 x SAM turrets (one per quadrant with independent targeting), for 360 degree multiple cover. Each SAM turret carries 8 missiles (Rapier example), giving a battery of 32 rockets to fend off enemy aircraft. This micro battleship is also shown here with 4 Tomahawk cruise missiles in protected bays, fore and aft, and 4 x 21" MK48 torpedoes in the outriggers - all drawn to scale - as a prelude to proof of concept. The torpedoes and cruise missiles would not be visible, but we've shown them in x-ray. The OAL of this clever design is 52.7m or 171 feet. She is designed to cruise all day and night at 7-10 knots using only energy from nature - and sprint up to 25knots (depending on specification) in attack mode. This original concept vessel is design copyright © BMS Ltd 2014.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
This website is Copyright © 2014 Bluebird Marine Systems Ltd. The names Bluebird™, Bluefish™, SeaNet™, SeaWolf™ and the blue bird and fish in flight logos are trademarks. CONTACTS The color blue is a protected feature of the trademarks.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||