|
ROBOT DRONE SHIP - FEATURING ROV/ARRAY AUTO LAUNCH & RETRIEVAL
|
||||||||||||||||||||||||||
|
In a world where automation is improving the efficiency of operations in just about every field of human endeavor, the latest development on the drawing board is a robot ship that can do just about everything but make the toast - in theory that is - because the hull is at the conceptual stage. What is different about this ship, is that it is a Zero Carbon Cruiser (ZCC), or Zero Emission Vessels (ZEV).
This sequence shows launch and recovery of a one meter diameter craft. Recovery is the reverse of the launch sequence.
The same sequence with larger pictures is shown below. Not so easy to follow as that above sequentially, but shown in more detail. This is the first ship that is designed for auto ROV retrieval. It does not need cranes to lower an ROV and because the mechanism is an integral part of the hull that is already in the water, launches and recoveries may take place is sea states that no captain could consider using cranes, etc. This design feature, of course, increases productivity and reduces the chance of accidents on deck.
If
your company needs to survey the oceans for whatever reasons, why not
consider using a ship that runs on energy harvested from nature.
Previously, this might not have been practical, but the power to weight
ratio of this advanced machine is well over twice that of any ocean going
electric ship on the oceans today. Expressions of interest are invited.
Much research is ongoing with experiments to guide an ROV safely home to a mothership where it might dock without damage. One of the main problems is when the sea surface is rough, not only creating physical alignment problems from bobbing, but also froth clutter that frustrate sensors being used to guide an ROV home, equally problematic where the docking is automatic on the part of an autonomous UUM. A Bluefish ZCC hull virtually eliminates that problem, because the recovery vessel is itself submerged and deep enough below the waves to give a returning ROV a much better chance of docking on the first attempt.
We have not illustrated details of the proposed docking system, where the method is patent-able, and we wish to preserve the state of the art for the benefit on investors. Where many navies and research establishments are currently working on surface docking systems, we would be more than willing to team up to develop the ZCC system to meet with their requirements. Please contact us to discuss possibilities.
The Bluefish/SNAV mother-ship is an artificially intelligent marine robot that may launch and recover ROVs and towed arrays automatically, during autonomous missions. The craft may be switched to drone/manual operation from a shore base, once the craft alerts the owners to a find, which can be anything the unit has been programmed to search for; mines, mineral deposits or sunken treasure.
This
design is arguably the most versatile ship in the world, especially when
considering that it has an active hull, and that the energy capture apparatus
is also controlled automatically to maximize performance.
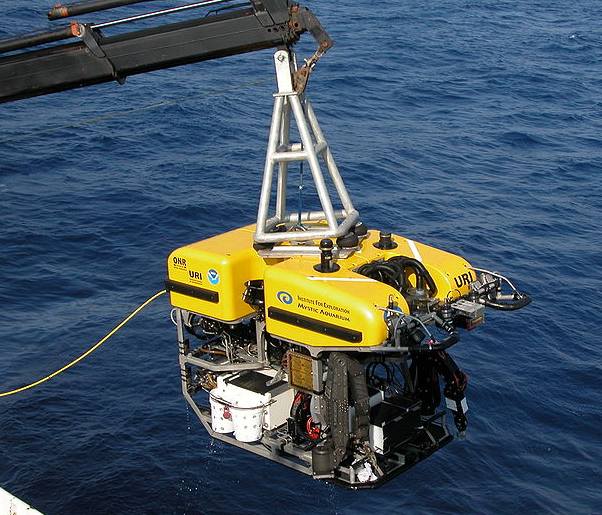
An example of conventionally launched of ROV using a crane (left).
All enquiries should be directed to:-
The IP Manager BLUEBIRD MARINE SYSTEMS LTD Solar House, Herstmonceux BN27 1RF, United Kingdom
Email: Contact: ip@bluebird-electric.net
LINKS
How do you build your own ROV? http://www.enterprise-europe-scotland.com/sct/news/?newsid=4306
|
||||||||||||||||||||||||||
|
This website is Copyright © 2014 Bluebird Marine Systems Limited. The names Bluebird™, Bluefish™ Solar Navigator™,Blueplanet Ecostar BE3™, Utopia Tristar™ and the blue bird in flight logos are trademarks. All other trademarks are hereby acknowledged.
|