FUNDING
PERIOD: Sep 12, 2012 - Oct 12, 2012 (30 days) -
RESULT: 1,152 Backers contributed $83,424 = $3,424 dollars
generously oversubscribed.
The
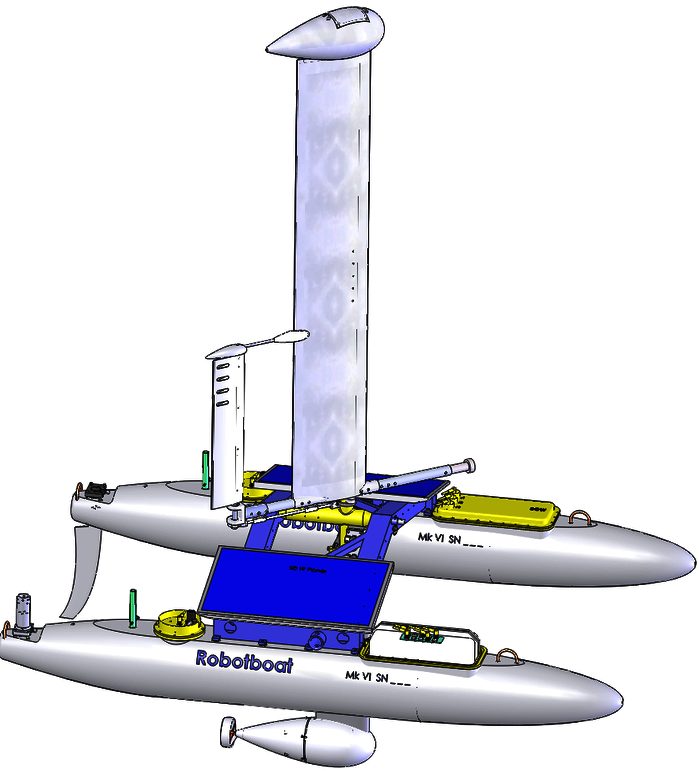
Roboboat team are building a fleet of autonomous sailing robots to study the oceans. Each boat
is capable of sailing itself anywhere to send data back to shore.
They were asking for your help to produce and test the ROBOTBOAT MARK VI. Each robotboat is fully autonomous, needs no fuel, and will bring to bear myriad sensors at remote points on the surface of oceans, lakes, and rivers.
They suggest thinking of it as a satellite for the seas.
OBJECTIVES
To be effective, the team need lots of low-cost self-propelled robots to study the health of the world's water. Never send a person to do a buoy's job! The real value of this technology lies at
fleet level, but given the extremely high performance required of each boat, purchasing even a few of them is simply beyond
their means. Building one boat represents a huge step towards cheap data. Building more than one boat will allow
them to test swarming algorithms, implement complex communication schemes, and take greater risks (e.g. undertake longer, more challenging missions).
Bringing this opportunity to the kickstarter community will allow the
Robotboat team to develop this technology MUCH FASTER than they could if
they had to fund it themselves; the more resources they can raise here, the faster
they can deliver research data.
WHY SHOULD
YOU CARE
Perhaps Lilly Tomlin said it best: "I said 'Somebody should do something about that.' Then I realized I am somebody."
No matter where you stand on issues like climate change, marine conservation, offshore energy production etc.,
the Robotboat VI team hope you'll agree that everyone is better served by policies and behavior based on empirical scientific evidence. We should all care about how we manage our water resources.
This team think Robotboat VI is the best way yet to generate information about the world's oceans.
* More data = better ocean management
* Fully automatic = cheap to acquire data
* Fast = station-keep in high seas; get to points of interest quickly
* Durable = collect longitudinal data; self-righting
* Each boat = millions upon millions of datapoints
THE
TEAM
The team consists of: Walt, Rob, TJ, and Eamon.
They are a professional engineering team who between them hold 8 patents and have over fifty years of engineering experience.
Their principals (Walt & Rob respectively) founded the (a) Planetary Systems Corp. and
(b) Tiger Innovations companies.
TJ and Eamon have worked for Walt making satellite subsystems for the last few years (among other pursuits).
They've designed and executed dozens of successful missions. They've produced space flight hardware, ground station equipment, and remote sensing systems for the most demanding customers in the world, Collectively,
their expertise is in developing robust mechatronics.
HOW ARE
THEY GOING TO PULL THIS OFF?
The team have built & tested 5 autonomous sailing robots over the last several years.
Their boats have completed hundreds of hours of fully autonomous navigation and traversed hundreds of kilometers on the water.
They've proved a robust sailing algorithm, logging GPS traces of upwind tacking maneuvers without
human control.
They've completed the Robotboat Mark VI design to be built like a surfboard; it will be incredibly strong and be capable of being rolled in waves indefinitely.
They
pledge not to quit, neither will their boats. The Robotboat Mark VI features a patent pending self-righting mechanism, the first and only such system in existence. It can prosecute targets day or night, rain or shine, wind or doldrums, thanks to its advanced wing sail and assistive
electric propulsion system.
FUNDING
ESTIMATES
They need your help. R&D of this nature is not cheap.
Mechanical and electrical components = $40k
Tooling (molds & dies) = $30k
Average cost per test = $1k
Expected test quantity = 10x
TOTAL = $80,000
We're trying to build as many of these boats as possible.
FAQs
Is this ever going to be open source?
This has always been a tough issue for us. We have chosen to keep many of the technical details of the project under wraps for now, but this is a somewhat uneasy compromise. We use open source tools all the time. Both Rob and I have been running at least one linux box since time immemorial. We are well aware that it is no exaggeration to say that this project (indeed most of the computing landscape as we know it) depends upon the work that others have made open. Also, we do recognize that going open source can be majorly beneficial in helping a project mature quickly. We do plan on making all of our designs, notes, whitepapers etc. free and open in the future, but we'd also like to a build a successful company around this technology. To date we have invested THOUSANDS of HOURS (not to mention hundreds of thousands of dollars) into this, and unlike university folks, we have no financial backing besides our day jobs. We discovered early on that the difficulties we face in developing the Robotboats are the EXACT reasons we need them; it is very difficult and expensive to operate on the water. We think it neither selfish nor unreasonable to try to get some of that investment back, and until that happens we will likely keep the details of our key technical innovations pretty close to the chest. As a compromise, we've decide to make the DATA ITSELF free (which is really the important part anyway).
So what are these sensors you're talking about?
We live in a very exciting time in sensor development! Robotboat Mk VI has ample power to run all sorts of electronic sensors. The boats can handle many low-power sensors continuously, and high power sensors on lowered duty cycles. At the most basic level, any vessel that is trying to sail will need to 'know' where it is, where it's going, which direction it's facing, and how the wind is blowing. Additionally, it would need to know where its rudder and sail are, and, practically speaking, lots of other state variables. The baseline sensor package for the MK VI includes GPS, IMUs, cameras, temperature sensors, relative wind direction sensors, and a wind speed sensor. We've built in the 'plumbing' for hydrophones / acoustic modems, even more cameras, hull speed sensors, conductivity sensors, oxygen sensors, barometers, opto-fluidic water quality sensors, hydrocarbon sensors, Geiger counters, salinity sensors, CO2 sensors, pH sensors, pressure sensors, and load cells. We've done our best to future-proof the design by standardizing payload interfaces and can provide power and telemetry to analog, digital, whatever. On-board sensors can be placed at various places along either of the two hulls, or the mast, or the keel. Placement can be high enough for radar and low enough for active sonar profiling and triangulation.
What kind of electrical hardware is 'under the hood'?
The Mk I & II used off-the-shelf laptops (Mk I ran on windows 95!). For the the Mk III we went with a micro controller (Rabbit 3k series). As many of you may know from personal experience, debugging an embedded system is way harder than debugging 'normal' code (which may not be so easy itself!). By the time the Mk IV came along, we decided to modularize everything, which made swapping different control hardware a breeze (we also cut the number of control surfaces in half, so the control problem got a lot simpler!). The Mk IV & V have been run with a laptop, a low-power headless PC, couple different flavors of uC, a gumstix, and even an android phone. Slowly, we've been replacing sub-components with custom boards and FPGAs. The Mk VI computer is awesome... really low power. Rob is also using much of the same hardware he uses in the micro-satellites he builds, which means our system is as fault tolerant as they come (you can't go repair satellites, and we don't want to have to go repair
Robotboats).
Haven't we seen stuff like this before?
There have been at least two related projects on KS and there are several companies currently manufacturing related products. Personally, I think there is an abundance of opportunity for automated watercraft, & we would love to see a panoply of boats coming on-line in the next few years. We do think that Robotboat is a substantial improvement over everything that we have seen so far.
The Scout project seems to have left an awful lot of energy on the table by not employing sails, and Protei, for all the wonderful public interest, media, and presentations they have generated, have yet to demonstrate a working prototype (that we can find). Plus we have some serious concerns about the feasibility of using a small craft to drag a heavy load. The X-1 from HarborWing is AWESOME, and its creator is probably the world's foremost expert on autonomous catamarans (coincidentally, a classmate of Rob's). However, we expect to be able to build ~1,000 Robotboats for the cost of one X-1. Liquid Robotics's waveglider is also a particularly elegant piece of technology, and there are many wavegliders already out there. We're really jazzed by their design - a mechanical AC 2 DC converter, smooth & strong. However, apparently wavegliders are very slow.
See http://www.wired.com/gadgetlab/2012/05/wave-glider-crosses-pacific/ for more discussion as to why that is important. Also, if we are interpreting their technology correctly, the wavegliders are not able to operate in very shallow waters. We think there is an awful lot of
l to be done close to shore, and on shallow rivers and lakes, in addition to the open ocean. In the end, Robotboat only represents our best efforts, and, if someone has a better solution, we would love to see it. The world really does need this stuff!
http://www.pca.state.mn.us/water-types-and-programs/surface-water/lakes/lakes-and-lake-monitoring-in-minnesota
Can this technology be used to make an 'autopilot' for recreational sailing?
We haven't put a lot of effort into doing so, but the answer is yes. Many of the subsystems we've developed, especially the custom marine actuators, are probably quite useful in other areas. Wing sails make sailing a breeze (so punny around here). That being said, part of the allure of sailing is being at the helm amidst the sounds of a cloth sail luffing while ducking the boom. We don't expect that the recreational sailing market really wants this tech. We've been thinking about lots of other applications
though.
http://news.cnet.com/8301-17938_105-57420784-1/cargo-ship-with-metal-sails-would-save-30-percent-fuel/
Will Robotboats pose a hazard to ships? How will you avoid other potential collisions and debris on the water?
One of the reasons that Robotboats are small is so that they will not pose a credible threat to existing vessels. Strong as they are, Robotboats will harmlessly bounce off of the hulls of almost all watercraft that carry people and goods. To people on pleasurecraft, jetskis, or tenders, Robotboats will be at least as visible as other traffic. At night Robotboats will be lit with red, green, and white in accordance with maritime standards. We do anticipate hazards in snagging on abandoned fishing nets, kelp etc. That is a very tricky problem. Much of the work of which we are most proud lies in our object recognition and avoidance scheme. When we say truly autonomous, we mean it.
Have you tested the telemetry systems?
Yes! As we mentioned briefly in the description, we've done a LOT of testing. Most of it pretty boring, with the occasional epoch of outright terror. Our command and control protocol is pretty sophisticated, truly and entirely packetized, and based on military-grade satellite systems. We've successfully operated on several physical layers, including local RF, GSM/CELL, zigbee, and wifi. The Mk VI will also be outfitted with a satellite modem. We are confident that the telemetry system is essentially platform independent and capable of handling connectivity outtages.
THE DEALS
Pledge $1 or more - 281 backers
THANKS, AND HERE'S SOME TRUTH We’re after data, and we hope you’ll share our conviction that the world needs it. To this end, we will publish data accrued throughout the lifetime of any robotboats built with the support of the kickstarter community free for the world on our website.
Estimated delivery: Nov 2012
Pledge $8 or more
- 148 backers
POSTCARD FROM THE EDGE. Backers at this level and all higher levels will be invited to submit a short phrase. We will choose our top five favorite phrases and put them up for a vote. We will then have Robotboat sail the phrase (see bottom of main section) and produce a postcard from the GPS trace. We will then mail the postcard to you so you can brag to your friends about how cool Robotboats are.
Estimated delivery: Feb 2013
Pledge $20 or more
- 209 backers
FLOATY KEYCHAIN Sailing enthusiast? Water lover? Key aficionado? Perhaps this sponsorship level is right for you… tell the world you realize that which gets measured gets managed. Help us measure the oceans more efficiently than ever. Estimated delivery: Nov 2012
Pledge $45 or more
- 253 backers
LOOKRIGHT a fine t-shirt for your torso. Limited edition hand screened robotboat shirt. Unprecedented sartorial splendor can be yours! Estimated delivery: Nov 2012
Pledge $100 or more
- 86 backers Limited (414 left of 500)
NAMETAG It may be a long lonely journey, but robotboat will carry a piece of you with it wherever it goes. We’ll gladly engrave your name/text (<20 char) on the hull as a token of our appreciation for your generosity.
Estimated delivery: Dec 2012
Pledge $500 or more - 12 backers Limited (488 left of 500)
BOAT IN 4D Backers at this level will receive a small 3D printed model of the Robotboat Mk VI, our deep gratitude, and the NAMETAG reward as detailed above. This is the same technology we've used throughout development. Every time you lay eyes upon it, may it verily remind you that somewhere out on the open sea a robotboat is sailing under your patronage on the behalf of science. Estimated delivery: Nov 2012
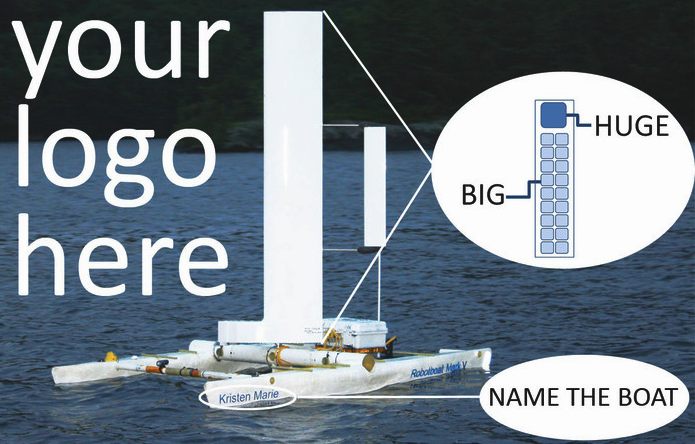
Pledge $1,000 or more
- 13 backers Limited (23 left of 36)
BIG DEAL We hope that plenty of people will see these Robotboats in action. Why shouldn't they see your sponsorship as well? Support at this level includes placement of a 6 inch by 6 inch (150 mm x 150 mm) logo, message, or image on the sail. Plus a 3D printed model of the boat as detailed above. Estimated delivery: Dec 2012
Pledge $5,000 or more
- 2 backers All gone!
HUGE DEAL Sponsors at this level will get ultimate placement of a 12 in x 12 in (300 mm x 300 mm) graphic of their design. Plus a 3D printed model of the boat. Plus a top flight sailing jacket (see below left). Plus an invitation to the maiden voyage. Estimated delivery: Dec 2012
Pledge $10,000 or more
- 0 backers Limited (1 left of 1)
TIPPY TOP Name the boat (keep it social, please). Christen it. Get decked out in all of the robotboat apparel mentioned above. A trio of 3D printed models? Yeah you got those. You will be invited as the guest of honor at the maiden voyage. TJ will cook you dinner.
Estimated delivery: Dec 2012
Author: Eamon Carrig
LINKS
http://www.kickstarter.com/projects/robotboat/robotboat-mark-vi http://www.militaryaerospace.com/articles/2013/07/darpa-uuv-mothership.html
http://nosint.blogspot.co.uk/2013/07/darpa-considers-unmanned-submersible.html
http://airsoc.com/articles/view/id/51f6a7809aad9d6f20000002/darpa-hydra-unmanned-submarine-to-deploy-drones#.Uhfr1NKsg6Y
http://en.wikipedia.org/wiki/DARPA
http://www.darpa.mil/
http://www.science.mod.uk/Engagement/the_portal.aspx http://www.science.mod.uk/Engagement/enterprise.aspx https://www.dstl.gov.uk/centrefordefenceenterprise https://www.dstl.gov.uk
UKHO
http://www.maritimejournal.com/news101/industry-news/ukho-appoints-new-national-hydrographer http://en.wikipedia.org/wiki/United_Kingdom_Hydrographic_Office http://www.ths.org.uk http://www.spri.cam.ac.uk/friends/committee/ http://www.thefutureofnavigation.com/ten_steps.aspx
https://www.dstl.gov.uk/insight
US
Department of Navy Research, development & Acquisition - http://acquisition.navy.mil/ US
Fleet Forces Command - http://www.cffc.navy.mil/
US
http://www.msc.navy.mil/
Kickstarter
robotboat mark vi projecti
The
key to accurate hydrographic mapping is continuous monitoring,
for which the Bluefish SNAV
40 meter platform, presently under development, is a robotic ocean workhorse. Based on a stable
SWASH
hull this design is under development in the UK, looking for international
agents and partners. The robot
ship uses no diesel fuel to monitor the oceans autonomously (COLREGS
compliant) at relatively high
speed 24/7 and 365 days a year - only possible with the revolutionary (patent) energy harvesting system. The
hullform is ideal for automatic release and recovery of ROVs
or towed arrays, alternating between drone and fully autonomous modes.
Licences
will be available for local build with technology transfer. This vessel
pays for itself in fuel saved every ten years: The next generation of
zero carbon ships.
OCEAN
LINKS
ADRIATIC
- ARCTIC
- ATLANTIC - BALTIC
- BERING
- CARIBBEAN - CORAL - EAST
CHINA - ENGLISH CH - GULF
MEXICO
INDIAN
- MEDITERRANEAN -
NORTH SEA - PACIFIC
- PERSIAN GULF - SEA
JAPAN - STH
CHINA
PLASTIC
OCEANS - SEA
LEVEL RISE
|