|
|
SCOUT TRANSATLANTIC @ 80 DAYS +
|
|
||
|
AUTONOMOUS NEWS UPDATE 2021
Following on from the Scout Atlantic bash in 2013, in 2020, a team comprising Promare, IBM, and many other technology partners, decided to attempt to cross the Atlantic against the prevailing winds and currents. They set out to build a 100ft craft named Mayflower Autonomous Ship (MAS) for launch and an attempt, aiming for the 400th anniversary of the Pilgrim Fathers journey starting on the 6th of September 1620.
They never made that date, partly due to Covid 19, but did manage to get a hull in the water for the ceremonies in Plymouth, Devon in 2020. On the 15th June 2021, the unmanned craft departed from Plymouth in England, aiming for Plymouth, Massachusetts, USA. You can follow the journey on their blog: https://mas400.com/dashboard
MAS 400 - The fully autonomous trimaran Setting off from Plymouth, England on the 15th June 2021. There are solar panels, that presumably add to the diesel-electric setup. The idea is to be COLREGs compliant with a self learning program, as such vessels build a database. Much the same as with the current bevy of self-driving robotaxis and robotracks. The question is therefore, will ships beat trucks to the autonomous punch?
SCOUT 81st day update. Well, that just about concludes our coverage of this attempt. The structure has stayed afloat for 81 days and will we think continue until picked up or beached somewhere. We would like to know what eventually happens and where the team might decide to go next.
Much as we'd like to see Scout somehow 'kickstart' back into life, we feel that it will need a robot paramedic and diagnostic defibrillator to somehow arrive in the Atlantic on a magic carpet. No, that is not going to happen. This team are operating on a shoestring, not a NATO budget. So, take heart lads, it has been an amazing Atlantic debut.
Whatever is the finale to this story we should all remember what is possible with a little faith and electronic derring-do, not least of which is the stoic support of the marine trade, in this case with Jameson Distributors leading the charge. We will always need boats, whether they are for cargo transport, pleasure cruises or military purposes, boats are here to stay and robotic assistance will make our fleets that much safer - after all the bugs have been ironed out.
13 NOVEMBER 2013 STATS Time
Elapsed: 81 DAYS: 08 HOURS: 12 MINUTES: 46 SECONDS Distance traveled by Scout
2595.92 Velocity: 0.7 mph
12 NOVEMBER 2013 STATS Time
Elapsed: 80 DAYS: 06 HOURS: 56 MINUTES: 52 SECONDS
11 NOVEMBER 2013 STATS Time
Elapsed: 79 DAYS: 01 HOURS: 04 MINUTES: 28 SECONDS Distance traveled by Scout
2595.92
Velocity: 0.7 mph
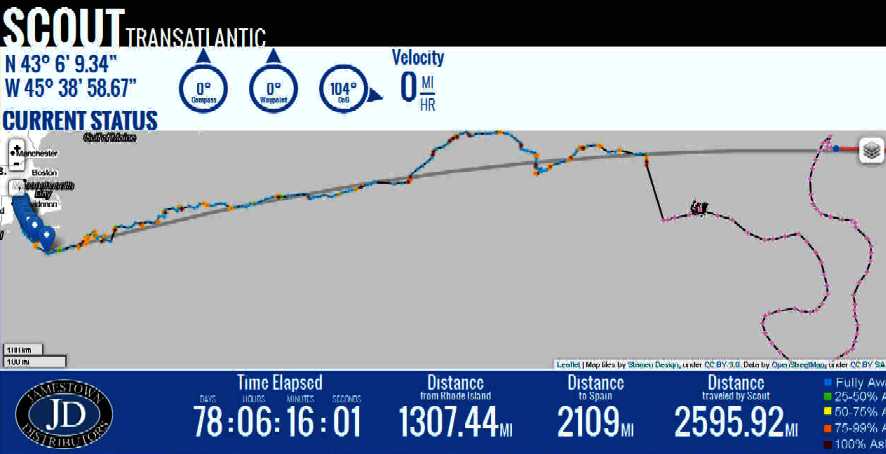
10 NOVEMBER 2013 STATS Time
Elapsed: 78 DAYS: 06 HOURS: 16 MINUTES: 01 SECONDS
CURRENT STATUS: N 43° 6’ 9.34” W 45° 38’ 58.67” Compass 0° Waypoint 0° CoG 104°
9 NOVEMBER 2013 STATS Time
Elapsed: 77 DAYS: 05 HOURS: 48 MINUTES: 10 SECONDS Distance
traveled by Scout 2595.92
Present velocity: 1.33 mph
8 NOVEMBER 2013 STATS Time
Elapsed: 76 DAYS: 05 HOURS: 44 MINUTES: 18 SECONDS
MICROTRANSAT UPDATE OCT 2013
On the sail powered front, a stoic Robin Lovelock launched the Snoopy Sloop again in October 2013 with similar results to his previous launches - due to slippage on a steering control component the robotic sailor crashed on rocks near Yarmouth rather sooner than hoped for. We must though remember that Edison tried a thousand experiments before perfecting the incandescent filament light bulb. So, nice one Robin and keep at it.
OCTOBER 15 1013 - NORTHEASTERN UNIVERSITY
When a friend with an ambitious goal to send an autonomous boat from Rhode Island to Spain approached David Pimentel, he jumped on the opportunity. “He needed someone to help program the idea he had, which has to send a boat across the Atlantic,” explained Pimentel. “Right away, I was very interested in doing it.”
Fourth-year computer science major Dave Pimentel wrote the navigation code for Scout Transatlantic, an autonomous boat on a mission to cross the Atlantic Ocean from Rhode Island to Spain. Original picture by Brooks Canaday.
The team’s other six members were responsible for creating the web application used to track the boat, programming communications software, form construction, and component fabrication, among other aspects. The boat’s battery is powered by solar panels, similar to how a motorcycle battery operates. Since Scout only moves
at a modest one mile per hour, on average, Pimentel and his team anticipate the trip will take another six to 12 weeks.
Click on the image above to follow progress live
Key to phases of robotic operation
In May of 2012, the PlanetSolar completed the first solar powered circumnavigation. At about that time a world autonomous navigation was proposed by the SolarNavigator team, also using a solar powered platform. Then in August 2013 PlanetSolar set the fastest solar record across the Atlantic, at 22 days.
Be sure to visit their website at www.GoTransat.com
FAMOUS ATLANTIC CROSSINGS - THE BLUE RIBAND (RIBBAND or RIBBON)
The Blue Riband is an unofficial
(but internationally recognized) accolade given to the passenger liner crossing the
Atlantic Ocean in regular service with the
highest speed. The term was borrowed from horse racing and was not widely used until after 1910. Under the unwritten rules, the record is based on average speed rather than passage time because ships follow different routes.
A ship is considered a "record breaker" if it wins the eastbound speed record, but is not credited with the Blue Riband unless it wins the more difficult westbound record against the Gulf Stream.
MAKE MAGAZINE 27 AUGUST 2013
Back in 2010, a group of college kids started working on an unmanned robotic motor boat that could cross the Atlantic from Rhode Island to Spain. Why? Because a robotic boat that motors around a pond or lake is cool, but one that can cross the ocean is an inspiration to everyone.
The crew consists of Dylan Rodriguez (engineering, Worcester Polytechnic Institute), Dan Flanigan (civil engineering, Bucknell University), Max Kramers (mechanical engineering, University of Rhode Island), Ken Muller (mechanical engineering, Worcester Polytechnic), Brendan Prior (liberal studies, Endicott College), Mike Flanigan (aerospace engineering, Notre Dame), and David Pimental (computer science, Northeastern). They started construction on the final version of their boat, called Scout, in April 2012. It launched on Aug. 24 and the crew has already broken the record for distance traveled by an autonomous transatlantic water craft. Scout had traveled about 100 miles out to sea by yesterday evening. They beat a previous record of about 60 miles set by a team from Aberystwyth University in the 2010 Microtransat Challenge.
Crew members carrying Scout for a test
Initially the crew wanted the solar-powered vessel to begin its journey earlier in the summer, to take maximum advantage of long sunny days. They were ready to launch from a point on Rhode Island on June 29, and made their first attempt. Bad weather prevented Scout from being able to collect enough power during the day to make it out to sea. Rather than risk the craft being washed up on shore, the crew collected Scout to try again.
A second attempt was foiled due to a faulty rudder servo. If you don’t succeed, try, try, again. Scout was successfully launched on the third attempt in the wee hours of Saturday morning on Aug. 24. The Scout Transatlantic project has a very nice feature that allows you to track Scout’s progress from your computer or mobile device. I’ve been stuck to the the automatically refreshing page like glue since I learned about the project this week.
The crew worked to design around every risk they could imagine. The hull was designed to be strong, but lightweight, reinforced with several sturdy bulkheads. They maximized the number of solar panels they could fit by removing the aluminum frames, and tilted the deck to face south for greater exposure to the sun. When power is low, Scout enters a low power drift mode to save batteries. An Arduino Mega microcontroller handles navigation, and a second Mega handles sensors and communications through an Iridium satellite transceiver. The software is reset every 12 hours to avoid pesky memory leaks or corruption from long term use. A weighted keel will right the boat if it should capsize. The boat is as water tight as they could make it, but it is also equipped with bilge pumps.
The route was planned to cross shipping lanes at right angles, minimizing chances of a collision. They planned to take Scout south into the Gulf Stream and cross the Atlantic as quickly as possible. The longer the voyage takes, the more chances there are that something will go wrong.
Although the crew worked hard to test and re-test the system, Murphy did manage to throw in one surprise. Scout included code to avoid having to backtrack to a waypoint that it had floated past while in drift mode. Instead the code caused Scout to bypass most of its planned waypoints. The crew has analyzed the error and understand what happened. They believe that Scout is now navigating to waypoint 44, near the coast of Spain. Once Scout reaches that waypoint, it should continue normally through the last sixteen or so waypoints to the shores of Sanlucar de Barrameda, Spain, where Columbus began his second journey to the New World.
This project didn’t get made as research for some corporation or government. It wasn’t made to win a contest, or for a school project. These guys built Scout because they wanted to, and they haven’t let anything stop them. Early on, one of the schools denied their request for lab space for the project. Due to legal concerns, they said. The crew was undeterred. They did their own research and consulted with a family friend with experience in marine law and decided to proceed.
Scout ended up costing about $6,000 to build. That’s not a lot of money as this sort of project goes, but quite a bit to come up with if you don’t have help. The crew has been very happy with their major sponsor, Jamestown Distributors, a family-run marine and building supply business. There are also many enthusiastic individual contributors who have donated money or just cheered for the crew on their Facebook page.
Through many, many hours of work, they built a boat that has so far succeeded where others have failed. Despite many technical challenges, the team persevered. They even had a minor run in with local police while testing Scout at night. Several teens hanging out on a dock at night may have looked suspicious, and the police were not inclined to believe their story about a robotic boat floating nearly invisibly out in the water. Would you? Luckily, they were able to show the police Scout’s blue marker light moving around and explained that the unmanned boat would come back to dock by itself in fifteen minutes. The police didn’t bother to wait around and left them to it.
Now that Scout is off to sea, the team actually has little to do but watch and wait. There is no way to give Scout commands, so it’s just Scout’s programming, systems, and hull against the ocean. Scout’s journey may take about three months, but the team will be able to make a much better prediction as time passes and more data is collected.
They are feeling confident that Scout will reach its destination, but even if it doesn’t, they’ve already succeeded. If Scout fails, they’ll build a new boat and make it better using what they learned the first time. In the meantime, they’ll keep watching http://www.gotransat.com/tracking/ with the rest of us.
Scout Video
LINKS
http://www.northeastern.edu/news/2013/10/scout/ http://makezine.com/magazine/transatlantic-drone-takes-to-the-sea/ https://twitter.com/ScoutTRANSAT https://www.facebook.com/ScoutTransatlantic http://www.wpri.com/on-air/green-team/ri-students-design-solar-powered-boat http://www.solarracing.org/2013/06/10/autonomous-solar-powered-boat-to-cross-the-atlantic/ http://letsmakerobots.com/node/38270 http://www.kickstarter.com/projects/601285608/scout-the-autonomous-transatlantic-boat http://www.kickstarter.com/help/school#defining_your_project http://www.kickstarter.com/start?ref=footer http://www.gotransat.com/ http://www.gotransat.com/tracking/ http://makezine.com/magazine/transatlantic-drone-takes-to-the-sea/ http://www.behance.net/gallery/SCOUT-Transatlantic/10153015 World
Sea
conditions, Temperatures
& Sunshine http://www.yellowbrick-tracking.com/ http://fishpi.org/wiki/index.php?title=The_Proof-Of-Concept_Vehicle http://fishpi.org/wiki/index.php?title=The_Prototype http://fishpi.org/wiki/index.php?title=Hull_Design http://www.raspberrypi.org/ http://international.findmespot.com/ http://www.amsat.org/
Blackcurrant 1 | Blackcurrant 2 | Catamaran Hull Design Drag | SWASH | SWATH | Trimaran
|
||||
|
This website is Copyright © 2013 Bluebird Marine Systems Ltd. The names Bluebird™, Bluefish™, Solar Navigator™,Blueplanet Ecostar BE3™, Utopia Tristar™ and the blue bird and fish in flight logos are trademarks. The color blue is an essential element of the marks. All other trademarks are hereby acknowledged.
|
||||