|

A
Cleaner Ocean Foundation volunteer in London, at the Oceanology
International 2022 event, ExCel. ROVs from dozens of manufacturers were on
display, covering almost every aspect of marine conservation, surveying
and inspection. This one is a ROTV, a towed vehicle from MacArtney. ROVs
can be tethered, battery operated with a data umbilical, and there is a
special modem option, that is under development. Treasure
hunters and archaeologists use ROVs to map sunken lost civilizations
and explore wrecks at the bottom of the ocean.

PREDICTION
- USVs Will Mature Quicker than UUVs among Defense & Security Users
As of today, Unmanned Underwater Vehicles (UUVs) have been used for a few decades, mostly for
mine countermeasures, oceanographic research, and
oil & gas surveys. They are proven. In contrast, Unmanned Surface Vehicles (USVs) have not been widely used and are yet unproven.
This situation is about to change. USV technology is maturing rapidly, and a number of USVs are market-ready, signaling a coming sea change in the makeup of the Unmanned Maritime Systems (UMSs) market. This is one of the major conclusions of a new research report titled: “Unmanned Maritime Systems – Defense & Security UUV & USV Markets, Technologies & Opportunities Outlook – 2012 – 2020”, by Market Info Group LLC (MiG).
This analysis-based, 530-page research effort, with its wealth of Figures (292) and Tables (223), explains the factors that give USVs a quicker adoption than UUVs. Furthermore, the report examines, analyses and predicts the evolution of USVs and UUVs for defense, security and anti-pirate missions.
http://www.marketinfogroup.com/usvs-will-mature-quicker-than-uuvs-among-defense-security-users/
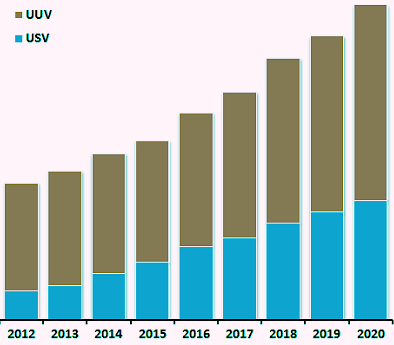
Global UMS Market Forecast by System Type
by [$Millions] – 2012-2020
Unmanned Maritime Systems – Defense and Security UUV and USV Markets, Technologies and Opportunities Outlook – 2012 – 2020
Publisher: Market Info Group LLC.
Lead Analyst: Antoine Martin
Publication: 09/2011; Pages: 530; Figures: 292; Tables: 223
The world’s Unmanned Maritime Systems (UMS) market is evolving rapidly under the combined impact of changing threats, economic, operational and technological advances.
Market Info Group LLC (MiG) is proud to introduce the most comprehensive, analysis-based, forecast to date. This forecast is guaranteed to help business developers, vendors, managers, planners, marketers, engineers, users, and investors, understand the complex dynamics of the UMS landscape and use these insights to establish, maintain and increase market competitiveness.
The report explores these subjects, among many others:
Current / Future Markets
Current / Future Technologies
Current / Future Uses
Current Vendors & Platforms
Mine Counter-Measures
Anti-Submarine Warfare
Port and Harbor Security
Counter-Terrorism
Counter-Piracy
UUV/AUV/USV
Furthermore, the report presents 50 detailed and reasoned Business Opportunities, ideas that will help you leverage your existing or potential capabilities into new markets. Business Opportunities are a unique MiG service, just like our free Buy a Report, Get an Analyst offer.
http://www.marketinfogroup.com/unmanned-maritime-systems-umv-usv-uuv-defense-security-markets/
ROV
OVERVIEW
A remotely operated underwater vehicle, commonly referred to as an ROV, is a tethered underwater vehicle. They are common in deepwater industries such as offshore hydrocarbon extraction. While the traditional abbreviation "ROV" stands for remotely operated vehicle, one must distinguish it from remote control vehicles operating on land or in the air. ROVs are unoccupied, highly maneuverable and operated by a person aboard a vessel. They are linked to the ship by either a neutrally buoyant tether or often when working in rough conditions or in deeper water a load carrying umbilical cable) is used along with a tether management system (TMS).
The TMS is either a garage like device which contains the ROV during lowering through the splash zone, or on larger work class ROVs a separate assembly which sits on top of the ROV. The purpose of the TMS is to lengthen and shorten the tether so the effect of cable drag where there are underwater currents is minimised. The umbilical cable contains a group of cables that carry electrical power, video and data signals back and forth between the operator and the TMS. Where used the TMS then relays the signals and power for the ROV down the tether cable.
Once at the ROV the electrical power is split and distributed between different components of the ROV. However in high power applications most of the electrical power is used to drive a high powered electrical motor which in turn drives a hydraulic pump. The hydraulic pump is then used to power equipment such as torque tools and manipulator arms where electrical motors would be too difficult to implement
subsea.
Most ROVs are equipped with at least a video camera and lights. Additional equipment is commonly added to expand the vehicle’s capabilities. These may include
sonars, magnetometers, a still camera, a manipulator or cutting arm, water samplers, and instruments that measure water clarity, light penetration and temperature.

Sonardyne and the NOC have a long standing technological relationship and have worked together on many
expeditions. This
science ROV is a work-class vehicle capable of descending to a
depth of 6500m. The underwater vehicle is supported with a containerized control room, workshop and spares storage, with a Launch and Recovery
System (LARS). Suitably sized and dynamically positioned (DP) ships of
opportunity allow the system to be freighted and operated around the
world.


For the first time ever, researchers
discovered a whale skeleton on the sea floor near Antarctica using the
ISIS. Thanks to advancements made with recording technology, the group
from Southampton University was also able to capture nine new deep-sea species surviving off the skeletal remains.
The planet's largest animals are also a part of the ecology of the very deep ocean, providing a rich habitat of food and shelter for deep sea animals for many years after their death. When a whale dies and falls to the sea floor, scavengers come in and quickly strip the carcass of its flesh. After that, organisms come in and colonize the skeleton, draining it of any remaining nutrients. Afterwards, bacteria come in and break down the remaining fats store in whale bones before finally, organisms come in and digest what remains of the whale bone.
HISTORY
In the 1950s the Royal Navy used "Cutlet", a remotely operated submersible, to recover practice torpedoes.
The US Navy funded most of the early ROV technology development in the 1960s into what was then named a "Cable-Controlled Underwater Recovery Vehicle" (CURV). This created the capability to perform deep-sea rescue operation and recover objects from the ocean floor, such as a nuclear bomb lost in the Mediterranean Sea after the 1966 Palomares B-52 crash. Building on this technology base; the offshore oil & gas industry created the work class ROVs to assist in the development of offshore oil fields. More than a decade after they were first introduced, ROVs became essential in the 1980s when much of the new offshore development exceeded the reach of
human divers.
During the mid 1980s the marine ROV industry suffered from serious stagnation in technological development caused in part by a drop in the price of oil and a global economic recession. Since then, technological development in the ROV industry has accelerated and today ROVs perform numerous tasks in many fields. Their tasks range from simple inspection of subsea structures, pipeline and platforms to connecting pipelines and placing underwater manifolds. They are used extensively both in the initial construction of a sub-sea development and the subsequent repair and maintenance.
Submersible ROVs have been used to locate many historic shipwrecks, including that of the RMS Titanic, the Bismarck, USS Yorktown, and SS Central America. In some cases, such as the SS Central America, ROVs have been used to recover material from the sea floor and bring it to the surface.
While the oil & gas industry uses the majority of ROVs; other applications include science, military and salvage. Science usage is discussed below, the military uses ROV for tasks such as mine clearing and inspection.

CONSTRUCTION
Conventional R.O.V.s are built with a large flotation pack on top of an aluminium chassis, to provide the necessary buoyancy. Syntactic foam is often used for the flotation. A tool sled may be fitted at the bottom of the system and can accommodate a variety of sensors. By placing the light components on the top and the heavy components on the bottom, the overall system has a large separation between the center of buoyancy and the center of gravity: this provides stability and the stiffness to do work underwater.
Electrical cables may be run inside oil-filled tubing to protect them from corrosion in seawater. Thrusters are usually in all three axes to provide full control. Cameras, lights and manipulators are on the front of the ROV or occasionally in the rear to help in maneuvering.
The majority of the work class ROVs are built as described above; however, this is not the only style in ROV building. Specifically, the smaller ROVs can have very different designs, each geared towards its own task.
MILITARY ROV
In October 2008 the U.S. Navy began to replace its manned rescue systems, based on the Mystic DSRV and support craft, with a modular system, the SRDRS based on a tethered, unmanned ROV called a pressurized rescue module (PRM). This followed years of tests and exercises with submarines from the fleets of several nations.
The US Navy also uses an ROV called AN/SLQ-48 Mine Neutralisation Vehicle (MNV) for mine warfare. It can go 1000 yards away from the ship, and can reach 2000 feet deep. The mission packages available for the MNV are known as MP1, MP2, and MP3.
The MP1 is a cable cutter to surface the moored mine for recovery exploitation or EOD detonation.
The MP2 is a bomblet of 75 lb PBXN-103 high explosive for neutralising bottom/ground mines.
The MP3 is a moored mine cable gripper and a float with the MP2 bomblet combination to neutralise moored mines underwater.
The charges are detonated by acoustic signal from the ship.
The AN/BLQ-11 autonomous Unmanned Undersea Vehicle (UUV) is designed for covert mine countermeasure capability and can be launched from certain submarines.
The ROVs are only on Avenger class mine countermeasures ships. There are 14 ships, operating mostly off the coast of Japan and California, and there are always four US minesweepers in the Persian Gulf: USS Ardent (MCM-12), USS Dextrous (MCM-13), USS Scout (MCM-8) and USS Gladiator (MCM-11).
During August 19, 2011, a Boeing-made robotic submarine dubbed Echo Ranger was being tested for possible use by the U.S. military to stalk enemy waters, patrol local harbors for national security threats and scour ocean floors to detect environmental hazards.
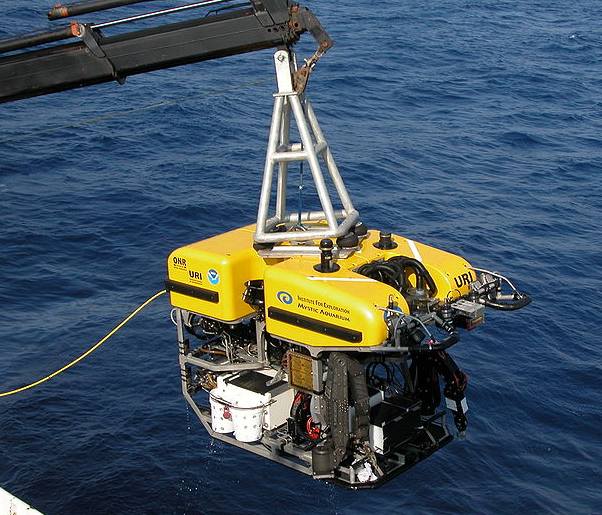
SCIENTIFIC ROVs
ROVs are also used extensively by the science community to study the ocean. A number of deep sea animals and plants have been discovered or studied in their natural environment through the use of ROVs: examples include the jellyfish Bumpy and the eel-like halosaurs. In the USA, cutting edge work is done at several public and private oceanographic institutions, including the Monterey Bay Aquarium Research Institute (MBARI), the Woods Hole Oceanographic Institution (WHOI) (with Nereus), and the University of Rhode Island / Institute for Exploration
(URI/IFE). The picture to the right shows the behavior and microdistribution of krill under the ice of Antarctica.
Science ROVs take many shapes and sizes. Since good video footage is a core component of most deep-sea scientific research, research ROVs tend to be outfitted with high-output lighting systems and broadcast quality
cameras. Depending on the research being conducted, a science ROV will be equipped with various sampling devices and sensors. Many of these devices are one-of-a-kind, state-of-the-art experimental components that have been configured to work in the extreme environment of the deep ocean. Science ROVs also incorporate a good deal of technology that has been developed for the commercial ROV sector, such as hydraulic manipulators and highly accurate subsea navigation systems.
While there are many interesting and unique science ROVs, there are a few larger high-end systems that are worth taking a look at. MBARI's Tiburon vehicle cost over $6 million US dollars to develop and is used primarily for midwater and hydrothermal research on the West Coast of the
US. WHOI's Jason system has made many significant contributions to deep-sea oceanographic research and continues to work all over the globe. URI/IFE's Hercules ROV is one of the first science ROVs to fully incorporate a hydraulic propulsion system and is uniquely outfitted to survey and excavate ancient and modern shipwrecks. The Canadian Scientific Submersible Facility ROPOS system is continually used by several leading ocean sciences institutions and universities for challenging tasks such as deep-sea vents recovery and exploration to the maintenance and deployment of ocean observatories.


Suitably
disguised ROVs could be used to rescue marine animals that are trapped in
fishing nets and ropes.
EDUCATIONAL
ROVs
The SeaPerch Remotely Operated Underwater Vehicle (ROV) educational program is an educational tool and kit that allows elementary, middle, and high-school students to construct a simple, remotely operated underwater vehicle, from polyvinyl chloride (PVC) pipe and other readily made materials. The SeaPerch program teaches students basic skills in ship and submarine design and encourages students to explore naval architecture and marine and ocean engineering concepts. SeaPerch is sponsored by the Office of Naval Research, as part of the National Naval Responsibility for Naval Engineering (NNRNE), and the program is managed by the Society of Naval Architects and Marine
Engineers.
The Marine Advanced Technology Education (MATE) Center uses ROVs to teach middle school, high school, community college, and university students about ocean-related careers and help them improve their science, technology, engineering, and math skills. MATE’s annual student ROV competition challenges student teams from all over the world to compete with ROVs that they design and build. The competition uses realistic ROV-based missions that simulate a high-performance workplace environment, focusing on a different theme that exposes students to many different aspects of marine-related technical skills and occupations. The ROV competition is organized by MATE and the Marine Technology Society's ROV Committee and funded by organizations such as the National Aeronautics and Space Administration (NASA), National Oceanic and Atmospheric Administration (NOAA), and Oceaneering, and many other organizations that recognize the value of highly trained students with technology skills such as ROV designing, engineering, and piloting. MATE was established with funding from the National Science Foundation and is headquartered at Monterey Peninsula College in Monterey,
California.
HOBBY ROVs
With an increased interest in the ocean by many people, both young and old, and the increased availability of once expensive and non-commercially available equipment, ROVs have become a popular hobby amongst many. This hobby involves the construction of small ROVs that generally are made out of PVC piping and often can dive to depths between 50 to 100 feet but some have managed to get to 300 feet. This new interest in ROVs has led to the formation of many competitions, including MATE (Marine Advanced Technology Education) and NURC (National Underwater Robotics Challenge). These are competitions in which competitors, most commonly schools and other organizations, compete against each other in a series of tasks using ROVs that they have built. Most hobby ROVs are tested in lakes where the water is calm, however some have tested their own personal ROVs in the sea. Doing so, however, creates many difficulties due to waves and currents that can cause the ROV to stray off course or struggle to push through the surf due to the small size of engines that are fitted to most hobby ROVs.

CLASSIFICATION
Submersible ROVs are normally classified into categories based on their size, weight, ability or power. Some common ratings are:
Micro - typically Micro class ROVs are very small in size and weight. Today’s Micro Class ROVs can weigh less than 3 kg. These ROVs are used as an alternative to a diver, specifically in places where a diver might not be able to physically enter such as a sewer, pipeline or small cavity.
Mini - typically Mini Class ROVs weigh in around 15 kg. Mini Class ROVs are also used as a diver alternative. One person may be able to transport the complete ROV system out with them on a small boat, deploy it and complete the job without outside help. Occasionally both Micro and Mini classes are referred to as "eyeball" class to differentiate them from ROVs that may be able to perform intervention tasks.
General - typically less than 5 HP (propulsion); occasionally small three finger manipulators grippers have been installed, such as on the very early RCV 225. These ROVs may be able to carry a sonar unit and are usually used on light survey applications. Typically the maximum working depth is less than 1,000 metres though one has been developed to go as deep as 7,000 m.
Light Workclass - typically less than 50 hp (propulsion). These ROVs may be able to carry some manipulators. Their chassis may be made from polymers such as polyethylene rather than the conventional stainless steel or aluminium alloys. They typically have a maximum working depth less than 2000 m.
Heavy Workclass - typically less than 220 hp (propulsion) with an ability to carry at least two manipulators. They have a working depth up to 3500 m.
Trenching/Burial - typically more than 200 hp (propulsion) and not usually greater than 500 hp (while some do exceed that) with an ability to carry a cable laying sled and work at depths up to 6000 m in some cases.
Submersible ROVs may be "free swimming" where they operate neutrally buoyant on a tether from the launch ship or platform, or they may be "garaged" where they operate from a submersible "garage" or "tophat" on a tether attached to the heavy garage that is lowered from the ship or platform. Both techniques have their pros and cons; however very deep work is normally done with a garage.

A
Cleaner Ocean Foundation volunteer in London, at the Oceanology
International 2022 event, ExCel. ROVs
from dozens of manufacturers were on display, covering almost every aspect
of marine conservation, surveying and inspection. This one is a ROTV, a
towed vehicle from MacArtney. ROVs can be tethered, battery operated with
a data umbilical, and there is a special modem option, that is under
development. Treasure hunters and archaeologists use ROVs to map sunken
lost civilizations and explore wrecks at the bottom of the ocean.
ATLANTIS -
MEDITERRANEAN SEA
ATLIT-YAM -
ISRAEL
BAIA -
ITALY
DWARKA -
INDIA
PAVLOPETRI -
GREECE
PHANAGORIA -
BLACK SEA
PORT
ROYAL - JAMAICA
RUNGHOLT -
DENMARK
THONIS-HERACLEION
AND ALEXANDRIA - EGYPT
YONAGUNI
JIMA - JAPAN
NAMING CONVENTIONS
ROVs that are manufactured following a standardized design are commonly named by a brand name followed by a number indicating the order of manufacture. Examples would be Sealion 1 or Scorpio 17. The design of a series of
ROVs may have changed significantly over the life of an ROV series, however an ROV pilot will often be familiar with the idiosyncrasies of a particular vehicle by name.
ROVs that are one-off or unique designs may be given a unique name similar to the style used for ships. ROVs are not normally referred to in the female gender as ships may be, but by gender-neutral pronouns or 'neuter words'.
LINKS
Electronic
Products
HD_cameras_researchers_discover_first_whale_skeleton_in_Antarctica_nine_new_sea_species
How
do you build your own ROV?
Build
your own ROV
The
SERPENT project (Scientific and Environmental ROV Partnership using
iNdustrial Technology)
ROV-online.com
| A resource for those interested in ROV, AUV, and robotics in general
ROV
Committee of the Marine Technology Society
Remotely
Operated Vehicles (ROV), Ocean
Explorer, NOAA
What
are Remotely Operated Vehicles (ROVs)?
ROVs
at the Smithsonian Ocean Portal
http://www.enterprise-europe-scotland.com/sct/news/?newsid=4306
|
ROVs Competition
- Youtube
|
|