|

The
OpenROV underwater robot
OpenROV is a open-source underwater robot.
OpenROV have developed a low-cost telerobotic submarine that can be built with mostly off-the-shelf parts.
The goal of OpenROV is to democratize exploration by allowing anyone to explore and study underwater environments.
OpenROV is
also a Do It Yourself telerobotics community centered around underwater exploration and
education, who are working together to create more accessible, affordable, and awesome tools for underwater exploration.
The backbone of the project is the global community of DIY ocean explorers who are working, tinkering and improving the OpenROV design. The community ranges from professional ocean engineers to hobbyists, software developers to students. It's a welcoming community and everyone's feedback and input is valued.
The project started in a garage in Cupertino, with a few guys who wanted to explore an underwater cave. After finding a global community of co-developers on Kickstarter, the project has evolved into a network of connected devices, exploring the oceans and lakes of the world.
You're welcome to join them. Either by building your own ROV or contributing on the forums. No prior experience necessary.
The
OpenROV community is also laying the foundation for globally-connected citizen scientists to share their data and findings.
Questions or suggestions?
HOW TO BUILD AN OPENROV
Building the OpenROV doesn't require a master in robotics or engineering, but it's a fun project that can be completed in a weekend.
They have laid down all the steps in a (hopefully) easy to follow guide.
When you have done with the building and used your ROV a few times, if you feel like you can start contributing, either
to the core system (body, electronics or code) or by building extensions (payloads) that plug in into the ROV. If you need help following instructions or if you're stuck at some step and something has gone wrong there are several ways to get help from the OpenROV users and developer community. First, carefully re-read and review all applicable instructions and make sure you didn't do something wrong or out of sequence. Many of these instructions involve long commands, and just one wrong character will mess the whole thing up. Additionally, You can also check the Troubleshooting page for additional information.
SPECIFICATIONS
Version 2.3
Dimensions: 30cm x 20cm x 15cm
Weight: 2.5kg
Depth rating: Goal of 100m. Tested to 25m so far.
Speed: 1m/sec
Power: 8 onboard C batteries
Design: Version 2.3
Body construction: Laser cut acrylic
Buoyancy: Inherently neutrally buoyant
Propulsion: 3 brushless motors (2 horizontal thrusters, 1 vertical thruster)
Tether: 1 single twisted pair communicating 10 megabit ethernet data for control and video
Control: Onboard embedded linux computer (beagleboard brand) controlled via remote web browser
Vision: Forward facing HD USB webcam and two 87lm LED light arrays on servo-tiltable platform
Design considerations: Completely open source / open hardware, off the shelf parts, small enough to test in a bathtub, kit can be assembled in one weekend, standardized payload bay. 
The
Beagleboard Beaglebone computer board BEAGLEBOARD BEAGLEBONE
COMPUTER
The BeagleBone Black is the newest member of the BeagleBoard family. It's a lower-cost, high-expansion focused BeagleBoard based on the AM335x Cortex A8 ARM processor from Texas Instruments. This upgraded version features onboard HDMI and 512MB of RAM.
The BeagleBone Black offers higher performance and ready to use out of the box convenience. It includes all the necessary accessories in the box so you can spend more time programming and less time sourcing parts. Whether operating standalone or in conjunction with another computer,
BeagleBone Black will provide developers easy access to industry standard interfaces and a well-developed ecosystem of software and tools. The original BeagleBone’s cape plug-in boards are also compatible with the BeagleBone Black making it easy to integrate into existing projects. How does Linux make the BeagleBone easier to use than a microcontroller-based
platform? The advantage of full-featured Linux is the Linux community. While the template-based coding of systems like the Arduino make it easy to copy-and-paste simple projects and a limited number of more complex libraries that don't have a lot of interaction, 20 years of Linux development have generated an extensive set of highly interoperable software that can be utilized and collaborated upon, without sacrificing the simplicity of doing something like toggling an LED or switch or reading an analog or I2C-based sensor.
The first example I have is node.js, the server-side JavaScript language interpreter with a rapidly growing community. The evented I/O model enables both building highly scalable web servers and being responsive to the many sensors within your embedded system. As part of the shipping image with the BeagleBone, we are looking to provide the git-enabled Cloud9 IDE that allows you to edit node.js applications directly over your web browser by simply pointing it to the BeagleBone. While this technology will be in a highly-alpha quality state intended to communicate the possibilities for making a quantum jump in rapid prototyping with Linux when the BeagleBone is initially launched, we intend to collaborate with the Linux, Cloud9 IDE (Ajax.org), node.js, github.com and BeagleBoard communities to evolve this to Arduino-like simplicity, without the need to install any development tools or understand Linux programming details. Development of the application library will be done entirely in the open and is awaiting launch until there is broad availability of the hardware to avoid any undue refactoring that might come from not having the proper collaboration and review.
FEATURES
•Processor - AM3358/9 600MHZ (USB) - 800MHZ(DC)
•SDRAM - 512MB DDR3L 606MHZ
•Flash eMMC - 2GB, 8Bit
•PMIC TPS65217C - PMIC regulator and one additional LDO
•Debug Support - Optional Onboard 20-pin CTI JTAG
•Power - MiniUSB or DC jack / 5V via headers
•PCB - 6 Layers, 3.4" x 2.1"
•Indicators - 1-Power, 2-Ethernet, 4-User Controllable LEDs
•HS USB 2.0 Client Port - Access to the USB1 Client mode via miniUSB
•HS USB 2.0 Host Port - USB Type A Socket, 500ma LS/FS/HS
•Serial Port - UART0 access via 6 pin header. Header is populated
•Ethernet - 10/100 RJ45
•SD/MMC - microSD, 3.3V
•User Input - 1-reset button, 1 - User boot button
•Video Out - 16b HDMI w/CEC
•Expansion - 5V and 3.3V power, VDD_ADC(1.8V), 3.3V I/O on all signals, McASP0,SPI1, I2C, GPIO(65), LCD, GPMC, MMC1, MMC2, 7 AIN (1.8V Max), XDMA Interrump, Power button, Expansion Board ID, (Up to 4 can be stacked).
•Weight - 1.4oz
The
Beaglebone Cape micro controller bridge
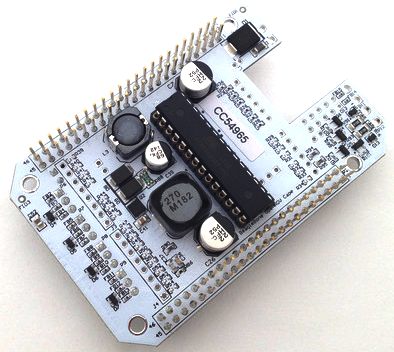
BEAGLEBONE CAPE
The Beaglebone Cape is a necessary bridge rather than a computer.
UPDATE: The OpenROV Cape is NOT compatible with the new BeagleBone Black. You can modify the BeagleBone using this technique. We're working on a redesign of the cape to make it work. Also, we are working on an update to the software that will allow it to run on the BB Black.
The OpenROV Cape bridges the gap between microcontrollers like the Arduino that are good at talking to low-level hardware (like servos, lights, motors, and sensors) and microcomputers like the BeagleBone that are good at doing intense processing and interacting with high-level devises like USB Webcams and Ethernet connections. Together, the OpenROV Cape and a BeagleBone are a powerful combination of brains and brawn that can handle some very intense robotics projects!
On board the OpenROV Cape is an Atmega328 running Arduino (so you can program it using the Arduino IDE), power regulation and conditioning circuitry (which allows you to power the entire system with anywhere between 6 and 40v), some transistors (attached to the two auxiliary ports) that allow higher-power devises to be controlled with PWM from the Arduino, and four three-pin headers with sig, 5v, and gnd that allow you to connect servos or motor controllers directly to the board. There is circuitry attached to the Arduino for measuring voltages on the board, and there are even header holes that fit the Arduino header pattern so you can stack an Arduino Shield on top of the OpenROV Cape! Connection between the OpenROV Cape and BeagleBone is made through a UART connection, and all the remaining pins from the BeagleBone are passed through to the headers on the OpenROV Cape so there is still plenty of access to the BeagleBone GPIO.
If you want to learn more, the schematics and gerber files live on Github: https://github.com/OpenROV/openrov-electronics
Beaglebone computers are sold separately at MakerShed or SparkFun. CONTACTS Email
them at: Info@OpenROV.com
LINKS
arduino
computer (open source)
beagleboard
(open source)
picaxe
microcontroller (open source)
raspberry
computer (open source)
http://openrov.com/
http://wiki.openrov.com/index.php/Main_Page
http://www.youtube.com/user/RaspberryPiTutorials
http://www.raspberrypi.org/
http://rockblock.rock7mobile.com/
http://www.oceanbusiness.com/
https://code.google.com/p/raspy-juice/
http://www.yellowbrick-tracking.com/
http://fishpi.org/wiki/index.php?title=The_Proof-Of-Concept_Vehicle
http://fishpi.org/wiki/index.php?title=The_Prototype
http://fishpi.org/wiki/index.php?title=Hull_Design
http://www.modelsbydesign.co.uk/
http://www.raspberrypi.org/
http://international.findmespot.com/
http://www.amsat.org/
http://en.wikipedia.org/wiki/Composite_material#Autoclave_moulding
http://www.enecomitalia.com/ENG/caravans.html
http://www.python.org/
http://openrov.com/
http://openrov.myshopify.com/collections/frontpage/products/openrov-beaglebone-cape
http://www.makershed.com/BeagleBoard_BeagleBone_Black_p/mkcce3.htm?1=1&CartID=0
|