|
NAMOS - Robot Boat & Networked Marine Sampling
|
||
|
NAMOS is a collaborative research project involving robotics, sensor networks and marine biology.
The work is motivated by the scientific objective of obtaining high resolution information on spatio-temporal distribution of plankton assemblages in aquatic environments.
The goal is to develop robust, decentralized algorithms and supporting hardware that enable the network consisting of buoys and boat to perform adaptive hydrographic sampling using the information provided by the network.
BUOY
DESIGN
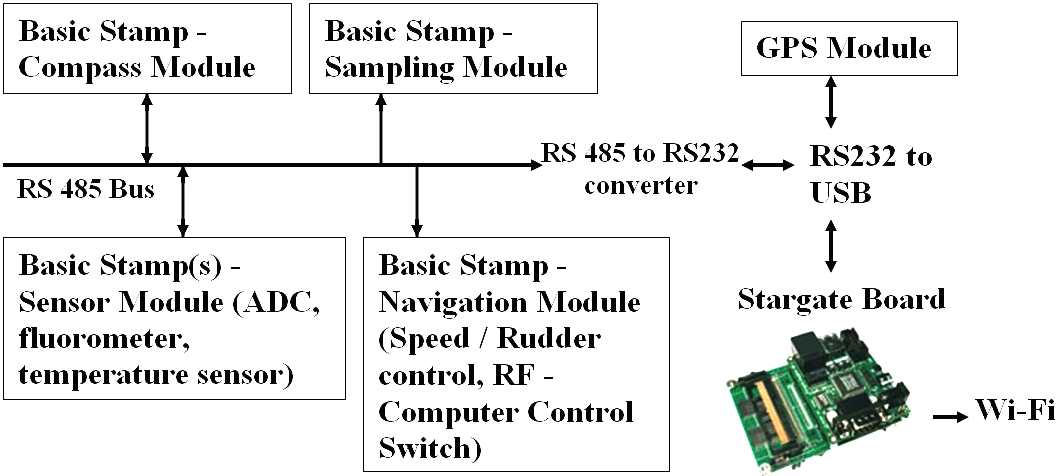
Each static node consists of a stargate board, an ADC board, a battery, a fluorometer and an array of 6 thermistors, which are mounted on a wooden chassis and sealed inside a water-proof container.
The stargate board uses Intel's 400MHz X-scale processor (PXA255) and an 802.11b wireless card for inter-node communication. It locally logs sensor data received from the ADC board, and transmits such data back to a base station.
The ADC board consists of a basic stamp module (24pin micro-controller BS2sx from Parallax, and two ADC chips (16 bit single channel ADS1100 and 12 bit 8 channel ADS7828 from Digi-Key). We use the basic stamp to control the two ADC chips to obtain data from the sensors. The ADC board is connected to the Stargate board through a USB/Serial converter.
Two types of
sensors are used: fluorometers and thermistors. A fluorometer measures the concentration of chlorophyll-a which is indicative of the density of certain photosynthetic micro-organisms in the environment.
The CYCLOPS-7 submersible fluorometer from Turner Designs Inc is used. It has three user settable gain ranges, which provide a wide measurement dynamic range of 0.03 to 500 micrograms/l. The thermistors
used have an accuracy of 0.1 Celsius. They are covered with a custom Titanium coating to make them corrosion resistant. The sensors are suspended from the side of the buoy into the water. The fluorometer is lowered to a depth of 1m below the water surface while the 5 thermistors are uniformly deployed from 0.5m to 2.5m below the water surface.
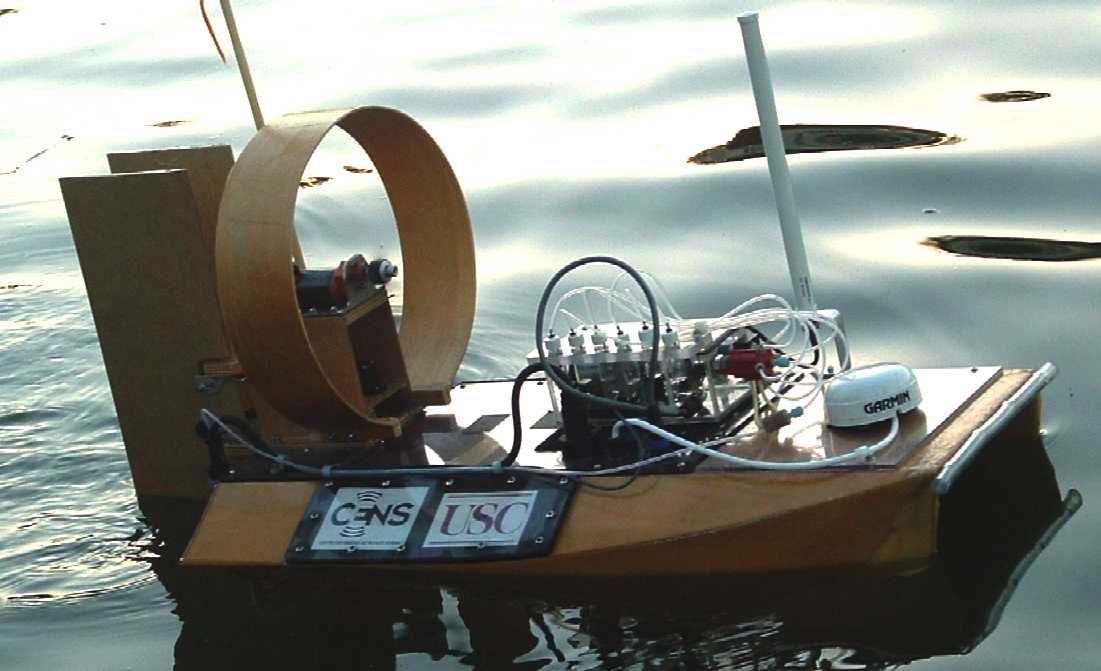
To achieve a high degree of spatial sampling, a robotic boat that can sense and collect samples for biological analysis is included in the network. The boat is directed by information collected and processed within the network to identify features of biological interest [e.g. temperature gradients, peaks in fluorescence (i.e. chlorophyll)] that it then samples. The boat can take measurements and samples at locations where the static entities cannot reach. It can track moving phenomena at greater spatio-temporal resolution than a static network alone. It can also potentially be equipped with expensive one of kind equipment which cannot be replicated for reasons of cost.
Communication with other nodes is based on EmStar over an 802.11b wireless connection. The boat is powered using rechargeable NiMH batteries which give it an approximate lifetime of 4-6 hours of continuous operation. The work undertaken via NAMOS, is now undertaken via CINAPS.
CINAPS
CINAPS (pronounced [sin-aps]) is the Center for Integrated Networked Aquatic PlatformS located at the University of Southern California (USC) in Los Angeles, California. The goal of CINAPS is to bridge the gap between technology, communication, and the scientific exploration of local and regional aquatic ecosystems. More specifically, the center is aimed at maintaining a finger on the pulse of our local coastal waters and the timely dissemination of information related to harmful algal blooms and general water quality to scientists, policy makers and the general public.
CONTACTS
namos@robotics.usc.edu
The
report above is based on work supported by the National Science Foundation under Grant No. CCF-0120778.
LINKS
http://www-robotics.usc.edu/~namos/index.html http://www.kickstarter.com/projects/robotboat/robotboat-mark-vi http://www.militaryaerospace.com/articles/2013/07/darpa-uuv-mothership.html http://nosint.blogspot.co.uk/2013/07/darpa-considers-unmanned-submersible.html http://en.wikipedia.org/wiki/DARPA http://www.science.mod.uk/Engagement/the_portal.aspx http://www.science.mod.uk/Engagement/enterprise.aspx https://www.dstl.gov.uk/centrefordefenceenterprise https://www.dstl.gov.uk http://www.maritimejournal.com/news101/industry-news/ukho-appoints-new-national-hydrographer http://en.wikipedia.org/wiki/United_Kingdom_Hydrographic_Office http://www.ths.org.uk http://www.spri.cam.ac.uk/friends/committee/ http://www.thefutureofnavigation.com/ten_steps.aspx https://www.dstl.gov.uk/insight US Department of Navy Research, development & Acquisition - http://acquisition.navy.mil/ US Fleet Forces Command - http://www.cffc.navy.mil/ US http://www.msc.navy.mil/ Kickstarter robotboat mark vi projecti
The key to accurate hydrographic mapping is continuous monitoring, for which the Bluefish SNAV 40 meter platform, presently under development, is a robotic ocean workhorse. Based on a stable SWASH hull this design is under development in the UK, looking for international agents and partners. The robot ship uses no diesel fuel to monitor the oceans autonomously (COLREGS compliant) at relatively high speed 24/7 and 365 days a year - only possible with the revolutionary (patent) energy harvesting system. The hullform is ideal for automatic release and recovery of ROVs or towed arrays, alternating between drone and fully autonomous modes. Licences will be available for local build with technology transfer. This vessel pays for itself in fuel saved every ten years: The next generation of zero carbon ships.
|
||
|
This website is Copyright © 2013 Bluebird Marine Systems Ltd. The names Bluebird™, Bluefish™, Solar Navigator™,Blueplanet Ecostar BE3™, Utopia Tristar™ and the blue bird and fish in flight logos are trademarks. The color blue is an essential element of the mark. All other trademarks are hereby acknowledged.
|