|
|
EPSRC - ENGINEERING and PHYSICAL SCIENCES RESEARCH COUNCIL
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Researcher: Dr Wasif Naeem (EPIC)
Funded by the EPSRC February 2011 - September 2012 (£101k, EP/I003347/1)
Introduction
Unmanned surface vehicles (USVs) are routinely being deployed in applications such as remote sensing, surveillance, coast patrolling and providing navigation and communication support to unmanned underwater vehicles (UUVs). In many instances, they are remotely operated to perform a specific mission in open or confined waters. The intelligence of these vehicles primarily reside in the navigation, guidance and control (NGC) systems design. Ideally, the vehicle needs to operate without any human intervention. This means that the vessel's onboard control system must be self reliant and able to maintain and supervise each onboard component. Having said that, even with the most advanced NGC design, the craft cannot be fully autonomous without the presence of an obstacle detection and avoidance (ODA) system. Studies have shown that, in manned vessels, more than 60% of casualties at sea are caused by collisions. In addition, it has been found that human error is a major contributing factor to those incidents. This could be due to an ever-decreasing number of crew members adding more responsibilities per person. For uninhabited surface craft, this cannot be overlooked as their collision with other manned ships could endanger human lives. Hence a human operator is always required to maintain a constant lookout for any potential obstacles.
Aim and Objectives
The aim of this project is to design and develop an ODA system primarily for an uninhabited marine craft. The evasive manoeuvres will be based on marine 'rules of the road' or collision regulations (COLREGs) on prevention of collision at sea defined by the International Marine Organisation. The ODA strategies that will be developed herein will be directly addressing one of the shortcomings of the current generation of unmanned surface vehicles, however, it could also be employed in manned vessels and other land based vehicles. The majority of the existing motion planning strategies either ignore parameters such as ship dynamics, environmental conditions and COLREGs or treat them on an ad-hoc basis. It is envisaged that this project will bridge this gap by considering these factors and thus automating this vital navigation component. In order to achieve this, multi-objective optimisation will be employed which will satisfy the criteria as specified above to determine a feasible path. A vision-based obstacle detection algorithm together with a laser range finder will also be investigated for close-range encounters and integrated with the path planning module.
PROGRESS REPORT AUGUST 2011
Work is steadily progressing in two distinct areas:
Path planning
1. A comprehensive literature review is being carried out by the PhD student, Sable Campbell.
3. An invited journal paper entitled "COLREGs-based Collision Avoidance Strategy for Unmanned Surface Vehicles" has been submitted to the IFAC Mechatronics Journal.
4. A talk was given at the Knowledge Transfer Network Workshop (Aerospace, Aviation and Defence), Bridging the Autonomous Divide, in London in May 2011. Details can be found here.
Obstacle Detection
1. A Post doctoral Research Assistant, Dr Mamun Abu-Tair, commenced on July 1, 2011 to work on object detection using a camera mounted on a pan and tilt platform combined with a laser range sensor.
Dr Abu-Tair will develop video processing algorithms for obstacle detection and classification in real time. A risk assessment methodology will be developed to classify potential collisions and integrated with path planning methods.
PROGRESS REPORT JAN 2012
Good progress has been made on developing COLREGs-compliant path planning algorithms. Currently, modified forms of A* are being developed in addition to integrating the dynamics of various types of vessels. A ship simulator package, 'Virtual Simulator' has been procured for training and generating videos to be used for obstacle detection purposes.
For obstacle detection, the hardware include a high-definition camera in conjunction with a laser range sensor. Standard background subtraction techniques along with Kalman filter based prediction algorithms are employed to estimate the current position of the obstacle and its projected position in the future.
Publications
1. Naeem, W, Irwin, GW and Yang, A, "COLREGs-based Collision Avoidance Strategy for Unmanned Surface Vehicles", Mechatronics 2011, DOI information: 10.1016/j.mechatronics.2011.09.012
2. Naeem, W and Irwin GW, "Evasive Decision Making in Uninhabited Maritime Vehicles", In Proceedings of the IFAC World COngress, Milan, Italy, Aug/Sep 2011.
PROGRESS REPORT MAY 2012
Obstacle Detection and Identification System
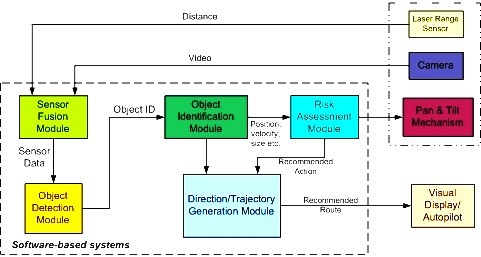
A Collision Avoidance system for Unmanned Maritime Vehicles has been designed and implemented. The proposed system employs a high definition video camera and a laser range sensor mounted on a pan and tilt device to detect obstacles in the vicinity of the ship. The reasons behind employing the pan and tilt devices are (a) to increase the coverage range and (b) to act as a stabiliser for the high definition video camera and the laser sensor mounted on it. Figure 1 shows the proposed system in operation.
Figure 1. The proposed ODA system in operation
Additionally, different software based subsystems have been implemented for the proposed solutions including Obstacle Detection/identification, Risk Assessment Unit and prediction subsystems. An extensive performance evaluation of the proposed system in virtual maritime environments has been conducted. Figure 2 shows the obstacle detection and identification subsystem has successfully detected the two cruisers present in the scene in real-time.
Figure 2. Detecting multiple dynamic ships by the obstacle detection and identification subsystem
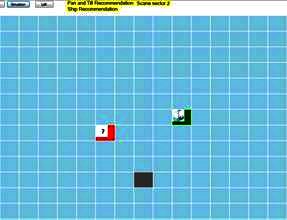
Figure 3 shows the captain radar screen. The figure illustrates this scenario in which the risk assessment unit requests the pan and tilt device to re-scan sector 2. The request can be seen at the top of the virtual map and will be highlighted for the operator.
Figure 3. A snapshot of the virtual map showing the recommended action for the pan and tilt subsystem
Publications
1. Campbell, S, Naeem , W and Irwin, G, W, "Improving the Autonomy of Unmanned Surface Vehicles through Intelligent Collision Avoidance Behaviours", Submitted to IFAC Journal of Annual Reviews in Control, 2012.
2. Campbell, S and Naeem, W, "A Rule-Based Heuristic method for COLREGS-compliant Collision Avoidance for an Unmanned Surface Vehicle", Submitted to 9th IFAC Conference on Manueovring and Control of Marine Craft, Arenzano, Italy, September 2012.
3. Abu-Tair, M and Naeem, W, "A Decision Support Framework for Collision Avoidance of Unmanned Maritime Vehicles", Submitted to 9th IFAC Conference on Manueovring and Control of Marine Craft, Arenzano, Italy, September 2012.
SUMMARY
The aim of this paper is to report the preliminary development of an automatic collision avoidance technique for unmanned marine craft based on standardised rules, COLREGs, defined by the International Maritime Organisation. It is noted that all marine surface vessels are required to adhere to COLREGs at all times in order to minimise or eliminate the risk of collisions. The approach presented is essentially a reactive path planning algorithm which provides feedback to the autopilot of an unmanned vessel or the human captain of a manned ship for steering the craft safely. The proposed strategy consists of waypoint guidance by line-of-sight coupled with a manual biasing scheme. This is applied to the dynamic model of an unmanned surface vehicle. A simple PID autopilot is incorporated to ensure that the vessel adheres to the generated seaway. It is shown through simulations that the resulting scheme is able to generate viable trajectories in the presence of both stationary and dynamic obstacles. Rules 8 and 14 of the COLREGs, which apply to the amount of manoeuvre and to a head-on scenario respectively are simulated. A comparison is also made with an offline or deliberative grid-based path planning algorithm which has been modified to generate COLREGs-compliant routes.
LINKS
http://www-robotics.jpl.nasa.gov/publications/Yoshiaki_Kuwata/Kuwata11IROS_final_v3.pdf http://www.theengineer.co.uk/news/epsrc-funds-usv-collision-avoidance-system/1004270.article http://gow.epsrc.ac.uk/NGBOViewGrant.aspx?GrantRef=EP/I003347/1 http://www.eda.europa.eu/projects/projects-search/effective-procurement-methods http://www.eda.europa.eu/info-hub/defence-data-portal http://www.defense-unmanned.com/article/1022/asv-wins-contract-for-unmanned-boat.html http://rpdefense.over-blog.com/tag/LEMUSV/ http://www.science.mod.uk/Engagement/the_portal.aspx http://www.science.mod.uk/Engagement/enterprise.aspx https://www.dstl.gov.uk/centrefordefenceenterprise UKHO - United Kingdom Hydrographic Office http://www.maritimejournal.com/news101/industry-news/ukho-appoints-new-national-hydrographer http://en.wikipedia.org/wiki/United_Kingdom_Hydrographic_Office http://www.spri.cam.ac.uk/friends/committee/ http://www.thefutureofnavigation.com/ten_steps.aspx http://www.quaynote.com/ankiti/www/?code=ecdis13&f=programme Wiki United_Kingdom_Hydrographic_Office https://www.dstl.gov.uk/insight US Department of Navy Research, development & Acquisition - http://acquisition.navy.mil/ US Fleet Forces Command - http://www.cffc.navy.mil/ http://en.wikipedia.org/wiki/Naval_Oceanographic_Office
The Bluefish SNAV platform, presently under development, is a robotic ocean workhorse. Based on a stable SWASH hull that can achieve high speeds for long duration. This robot ship uses no diesel fuel to monitor the oceans autonomously (COLREGS compliant) at 6-7 knots continuously 24/7 and 365 days a year - only possible with the revolutionary (patent) energy harvesting system. The vessel may also sprint from one location to another covering distances in excess of 100 nautical mile at speeds of over 10 knots - Thus may reach a target area within a relatively short response time. The hullform is ideal for automatic release and recovery of ROVs or towed arrays, alternating between drone and fully autonomous modes. International development partners and agents are welcome. Initial results suggest that this vessel pays for itself in fuel saved every ten years.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
This
website is Copyright © 2013 Bluebird Marine Systems Ltd. The
names Bluebird™, Bluefish™, Solar Navigator™,Blueplanet Ecostar BE3™, Utopia
Tristar™ and the blue bird and fish in flight
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||