|
ZEBRO LIGHT
|
|
|
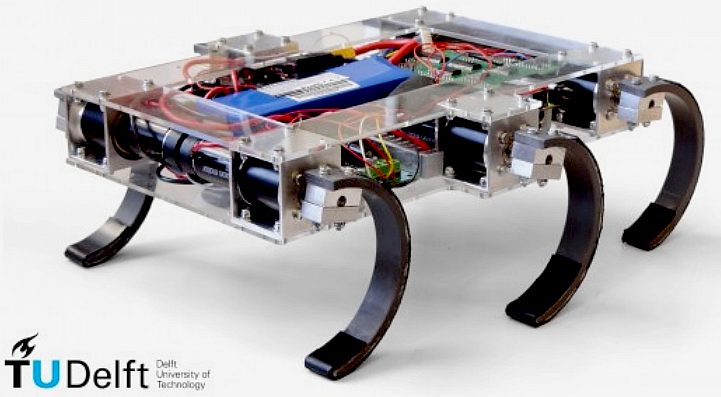
The ZEBRO LIGHT exploration robot
As part of their Bachelor of Science design project, J. de Bruijckere, R. Smit and L. Valk have developed a mechanical, electrical and software design for a lightweight, mobile exploration robot that employs the half-circle leg morphology.
The morphology is based on TU Delft’s Zebro
robot, which in turn is based on the RHex project, developed by a group of universities led by the Kod*Lab. The Zebro Light reduces the weight of the original Zebro from 7.5 to 3.2 kg, while also reducing the top surface area by 50%.
More details can be found in this short paper: 2013 JULY Zebro Light_Paper
The Zebro Light is able to cross various types of terrain, as shown in the figures above and below. The robot has been demonstrated at the NASA exhibition “A Human Adventure”, in Utrecht, the Netherlands.
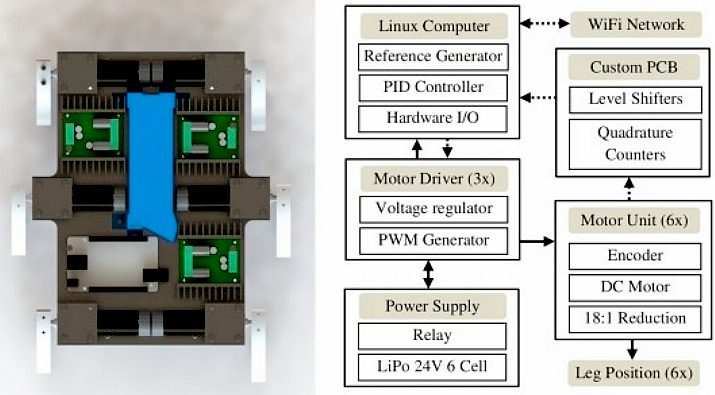
MECHANICAL
STRUCTURE
ELECTRONICS
ABOUT
THE DESIGNERS
EV3 SOURCE CODE
LINKS & REFERENCE
http://robotsquare.com/wp-content/uploads/2013/07/ZebroLight_Paper.pdf http://robotsquare.com/2013/08/01/ev3-source-code-github/
ROBOTS - Extend the ability of humans to do things and go places that would not have been possible only 50 years ago. As robots improve the potential for a brighter human future will blossom. This is true in almost every field of endeavor: Exploration, Health Care, Agriculture and Transport. Robots will only improve as humans work together to develop them. Help to make this happen by learning about robots.
|
|
|
This website is Copyright © 2016 Bluebird Marine Systems Ltd. The names Bluebird™, Bluefish™, Miss Ocean™, Ecostar DC50™ and the blue bird and fish in flight logos are trademarks. The color blue is an essential element of the mark. All other trademarks are hereby acknowledged.
|