|
SEAVAX™ - 1/20th SCALE UAS SCOUTING DRONES
|
||||||||
|
SYMA X5C - We have been using this small quad to develop the AUV friendly helicopter landing pad that is now a feature of the SeaVax autonomous design - as seen below. We were pioneering this application with a view to developing a suitably sized craft for scientific endurance ocean missions. But all that changed with the Ehang 184, that is available off the shelf and is a design that meets our criteria for advanced marine life and plastic scouting duties. The only modification needed for this long range electric AUVs is so that we may charge from the ships energy harvesting apparatus, or fast-charge from onboard battery-banks.
Helicopters and Quadcopter machines as used by hobbyists and professionals have become small enough that we can squeeze one onto the rear deck (extension) of the SeaVax feasibility model at very little cost, including an HD quality camera. There is a good selection of off-the-shelf products to choose from.
In recent years the industry has developed to the extent that UAVs (or UAS) are helping fire fighters and farmers as much as they are helping film makers get some stunning aerial footage without breaking their movie budgets. We'll be using the footage we obtain for our Youtube postings.
A quadcopter, also called a
quad-rotor helicopter or quadrotor, is a multirotor helicopter that is lifted and propelled by four rotors. Quadcopters are classified as rotorcraft, as opposed to fixed-wing aircraft, because their lift is generated by a set of rotors (vertically oriented propellers).
These vehicles were among the first successful heavier-than-air vertical take off and landing (VTOL) vehicles. However, early prototypes suffered from poor
performance, and latter prototypes required too much pilot work load, due to poor stability augmentation and limited control authority.
CHINA - EHANG QUADCOPTER @ CES JANUARY 2016
Chinese company Ehang has unveiled the world’s first passenger drone at CES
2016. The age of the Jetsons has arrived with this 500lb electric single-seat passenger drone.
The makers claim that is has a fail safe mode so that anything goes wrong it goes into a hover or finds somewhere safe to land.
SYMA X5C-1 MODEL QUADCOPTER
The Syma X5C is a 6 Axis Gyro stabilized quadcopter with a 2.4GHz 4 Channel Remote Control set.
It features 360 Degrees of accurate flying orientation. As with most toy and commercial quadcopters it is a mini Helicopter, and this one has an excellent 720P 2 million pixel HD camera that can capture and record every unforgettable moment from the skies as you fly, at the press of a button.
Like many of the excellent hobby aircraft on the market, Syma give you enough accessories to get you started, including spare blades. From our experience, we would recommend spare batteries and a stopwatch. The stopwatch may not be necessary when flying over land, but when flying over lakes and attempting to land on a moving boat, one cannot afford to ditch simply because you ran out of energy. Unless you modify your craft! That is tricky because small additional weight (floats) will cause you flying difficulty.
SYMA
X5C-1 Main Features: 2.4GHz control system, 6 axis gyro
Coolicool Syma x5c-1 6 axis gyro 4ch 24ghz quadcopter 360 degree flip hd camera
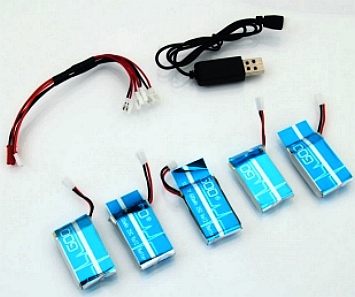
BATTERY UPGRADE X5C and X5A
If you need longer flying time you can buy this 5 piece Syma X5C.X5A Upgrade 3.7V 600mAh Li-Po Batteries + Multi-plug Charging Cable + USB Cable Set. With high capacity and stable performance, the lithium batteries in the pack can provide your remote control quad longer-lasting energy supplies. Each battery can offer an extra 7-10 minutes of flight time over the original battery. The distributors claim that they are easy to use and install. This battery set will not add too much weight to your helicopter. It is relatively low in price for budget conscious consumers. Split charging cables are also included for more convenient charging.
The camera gives passable footage. Be careful what and how you film, or the footage may be used to prosecute you. See the cautionary tale of Nancy Black and Jean-Michel Cousteau below.
Battery
Upgrade Features
and Specifications: Battery Dimensions (1.65 x 0.98 x 0.35)" / (4.2 x 2.5 x 0.9)cm (L x W x H) Package Includes: 5 x Batteries, 1 x Split charging Cable, 1 x USB Cable
HISTORIC LANDING - A Navy RQ-8A prepares itself for the first autonomous landing aboard the USS Nashville (LPD-13) during sea trials in 2006. The operational record was not perfect, but since then radio controlled helicopter sets have been sold in the thousands in toy shops all over the world with increasingly sophisticated electronics, including gyroscopic stabilization. This landing maneuver is near identical to the take off and landing of a quadcopter on the SeaVax ocean plastic monitoring craft.
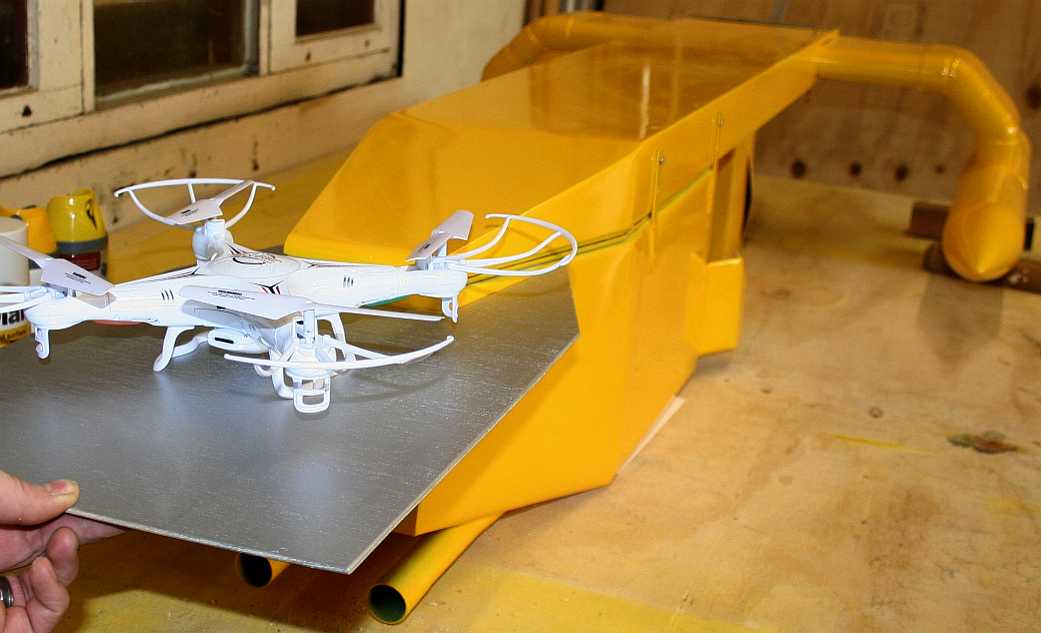
HELIO PAD - Where the US Navy experienced quite a few tips into the sea while their RQ series of helicopter drones were attempting to land on a moving ship, we have designed a landing pad that helps both drone and robotic unmanned aircraft to land as safely as they might. Our aluminium support frame bolts straight onto the back of the SeaVax 'proof of concept' model hull; the marine ply landing deck bolts to the ally frame to complete the structure - allowing us to change the size and features of the landing pad as we learn from our lake trials. The pictures above show our first experimental deck frame (underside) under construction, ending with painting in (high visibility) machine ocean yellow.
AUTOBOT - The diagram above shows the deck position on the rear of the boat. We will be looking at incorporating electronic/optical and/or infra-read or other guidance methods, such that a drone targets the landing pad, just the same as a modern passenger aircraft can land on a runway without a pilot. This will be a two way information stream, where the feedback helps docking.
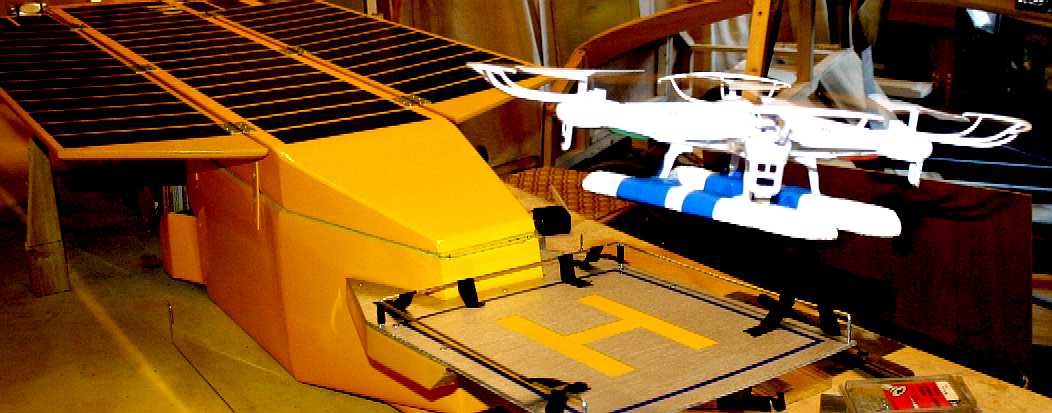
'H' IS FOR HELIPAD - The landing pad is held in position for this photo. There will be safety catchment railings (not shown here) to guide the quadcopter to a safe halt and prevent bouncing back off the deck and into the briny, even where the weather may be inclement. The rotors do not foul the hull, but just to be sure, the railings will guide the aircraft to a central stop position before the helicopter can do itself any damage.
SEAVAX SCOUT (SEASCOUT) - Autonomous landings are easier with a rear approach, for the simple reason that the apparent speed is reduced by the forward motion of the vessel. If a drone was approaching head on, there would be that much less time to synchronize airspeed to boat-speed, with an increased apparent speed, tending to collision. Another consideration in the case of the SeaVax, is that we have tall wind turbines at the front of the ship, making it a no-brainer in design terms. We don't want to risk damaging our energy harvesting apparatus as a copter attempts to play leapfrog with our rotary sails. The moveable solar arrays are not shown in this picture - and the solar panels that are waiting in the wings (if you'll pardon the pun) have yet to be installed. Judging from the move by the Indian Navy for similar technology for their fleet, UAVs will soon become the norm for maritime security. We doubt that any military aircraft will be electrically powered, like ours, unless operational economy becomes a critical factor. This is unlikely, since wars represent the ultimate in wasted energy and harmful pollution.
SURVEILLANCE - The increasing incidence of maritime crime has brought into sharp focus the constabulary role that navies have to perform. The significance of this role may be gauged from the fact that for a third of the world’s navies, this is a major facet of their functions. In the constabulary role, forces are employed at sea to enforce an international mandate. Force is only employed for self-defense or as a last resort in execution of this role. A SeaVax Scout could be an effective anti-piracy measure if deployed when suspicious behavior is detected - in the interests of self-preservation, or asset protection. Weaponry may not be necessary, where video footage can be relayed to the authorities in real time to summon assistance and as evidence should any potential pirates be silly enough to get themselves captured on camera, though laser and stun measures could be used as non-lethal deterrents.
STATIC TESTS - Our development team have been doing some basic tests with the SeaVax (Enterprise 1) static. You can see from these pictures that we've taped some floats to the Syma quad, just in case when we get wet, the aircraft slips overboard. Is this the first quad that can take off from water? No it's not - see the 'Mariner' below. Floatation tests proved successful prior to these take off and landing attempts.
The eventual full-size target specification is likely to be: Payload capacity of 30 kg (66 lb), range 10 miles (16 km), or endurance on station of 15 minutes at an altitude of 2,000 feet (600 m), with the ability to land on a SeaVax helipad in a 36 km/h (22 mph) crosswind. This is considered achievable taking into account the present state of technology - but in the end it is down to the energy storage to deliver. The "SeaScout" would have a rotor span of 5 meters, from the outside tip of one rotor, to the outside tip of the opposing rotor. A central carbon fiber monocoque body (that doubles as a hull in the event of a ducking) with smaller diameter tubes to the motors, would obviate the need for accessory floats. One day rechargeable fuel cell technology may be available for such applications, but not at the moment. This concept is not that far removed from the objectives of the Poseidron project below.
OCTOBER 21 2015 - POSEIDRON, LIFE SAVING RESCUE DRONE
A Spanish-conceived remote-controlled multicopter built to support maritime search-and-rescue services has taken home the grand prize at the European
Satellite
Navigation Competition 2015, which will see it obtain both cash and further support.
Poseidron’s inventors claim it is both faster and more cost-effective than other rescue systems, which in turn significantly increases the chances of survival - particularly in cold waters.
"For the German Federal Government, the digitalisation of the economy and society at large is one of the most crucial endeavours of all, and satellite-based services are becoming a more and more important part of the process. Through this European competition, we want to support innovative companies in turning their ideas into market-ready products. Today, I'm delighted to have the opportunity to provide this start-up assistance to this year's winners. As many of their predecessors have shown in years past, they will now have excellent chances to enter the market with their winning applications."
POSEIDRON - The main purpose of Poseidron is to reduce the number of fatalities far out at sea when people fall overboard or are involved in shipwrecks that occur during illegal immigration. The project consists of one large drone that is designed to increase the survival possibilities of those stranded at sea by providing a faster response and better service than existing solutions. The multicopter weighs 80 kg, can operate for more than 180 minutes, and has a diameter of four metres. It is capable of lifting up to 70 kg and is designed to take off from a mid-size boat. Thanks to its thermal cameras and the EGNOS system, the multicopter is able to immediately localise people in the middle of the water. When it arrives at a fatality, Poseidron will launch an inflatable dinghy. Depending on the weather conditions, it will tow the dinghy to a rescue boat or maintain its position in order to facilitate rescue. Poseidron can also localise and monitor fuel spills and provide support during humanitarian catastrophes. Thanks to Galileo and EGNOS, the drone will have the ability to fly safely, maintain its position accurately, and alert the emergency authorities. Contact: lolesalbiol@gmail.com
EUROPE'S INNOVATION NETWORK FOR SATELLITE NAVIGATION
SATELLITE INNOVATION CONTACTS
Anwendungszentrum GmbH Oberpfaffenhofen
Telephone +49 (0)8105 77 2 77-10
ESA BIC Bavaria Email:
esa-bic@anwendungszentrum.de
Comparison of GPS, GLONASS, Galileo and Compass (medium earth orbit) satellite navigation system orbits with the International Space Station, Hubble Space Telescope and Iridium constellation orbits, Geostationary Earth Orbit, and the nominal size of the Earth. The Moon's orbit is around 9 times larger (in radius and length) than geostationary orbit.
GALILEO - GLOBAL NAVIGATION SATELLITE SYSTEM (GNSS)
Galileo is the global navigation satellite system
that is currently being created by the European Union (EU) and European Space Agency (ESA), headquartered in Prague in the Czech Republic, with two ground operations centres, Oberpfaffenhofen near Munich in Germany and Fucino in Italy. The €5 billion project is named after the Italian astronomer
Galileo Galilei. One of the aims of Galileo is to provide an indigenous alternative high-precision positioning system upon which European nations can rely, independently from the Russian GLONASS and US GPS systems, in case they were disabled by their operators. The use of basic (low-precision) Galileo services will be free and open to everyone. The high-precision capabilities will be available for paying commercial users. Galileo is intended to provide horizontal and vertical position measurements within 1-metre precision, and better positioning services at high latitudes than other positioning systems.
SEAPLANE - It will be much harder landing on a moving target over water. Even static our pilot had to concentrate to achieve the correct flight path. Smaller drones are less controllable than the more expensive models. When this concept goes full size, that is when the fun will begin. Autopilots are already available for flying models that will return an aircraft back to base and land - as a safety feature and in the event that a radio signal is lost.
BARRIERS - Whoops, nearly overboard! The improvised barriers proved to be an asset on more than one occasion. The design needs improvement, with additional 'catcher' safety features. We think that a robot ship will benefit from guides that are tuned to the marinised drones it may carry. Work in progress.
'H' MARKS THE SPOT - Bull's-eye. After several practice runs the Syma was coaxed down to a perfect landing - marking the end to a great day in the workshop. The secret, as with most good landings, is to get the approach angle and speed just right. It won't be long before VTOL aircraft are available as models. It's a fine line between a quad and other VTOL aircraft. The main advantage to a swivel motor arrangement incorporating a wing, is forward speed allied to fuel savings. A quad could be modified to achieve some of that.
MMPA & WHALE RESCUE - The Marine Mammal Protection Act protects cetaceans like whales, dolphins, manatees, seals, sea lions, sea otters, walruses, and polar bears. (Sharks and other endangered marine animals are not protected under this legislation) Where our drone scouts are designed to pick up animals in distress such as to effect a potential rescue, certain rules should be observed such as not to fall foul of over zealous officials who might (judging by recent caselaw) get the wrong idea. Aircraft are required to maintain an altitude of at least 1000 feet from whales and 1500 feet for North Atlantic Right Whales. Unfortunately, the FAA advise ordinary drone pilots to fly below 400 feet - as you might agree, this kind of out of date legislation is hardly helpful. The conflicting guidelines that might mean it is impossible to save a whale caught up in fishing nets without breaking the law, where once detected the drone would have to steer well clear - and so not be able to report back what the problem is/was. Boats, on the other, hand may approach within 300 feet of a whale pod and 150 feet for dolphins - but what of rescue vessels? BMS are sure that where the preservation of animal life is the objective, that international regulations would be modified to allow such activities that are not commercially driven, and would encourage the IMO, UN and other agencies to consider modifying the rules to acknowledge such endeavor. An alternative is to alert the authorities to the need for a potential rescue - and wash our hands of a potential legal fight. We doubt though that the agencies involved would have the resources to respond to such alerts.
OBJECT LESSON - Jean-Michel Cousteau’s Ocean Futures Society, was forced to forfeit their $50,000 vessel for filming Nancy Black for baiting cameras to attract orcas. Defense attorney Mark Vermeulen of San Francisco said Cousteau, the son of Jacques Cousteau, was paid $1.05 million for the work his crew did alongside Black that day. This story was covered by Virginia Hennessey, Monterey County Herald. Virginia can be reached at 753-6751 or vhennessey@montereyherald.com
SOLAR WINGS - You can see from this picture that any onboard UAV scout would not shade the solar arrays, so would not get in the way of the energy harvesting functions of the robot mothership.
HELICOPTERS - We also tried out this small scale helicopter. For some maneuvers it was better than the quad, but overall, the quad was thought to be a superior performer and far more suitable for the advance scouting marine duties that we have in mind. It is a much easier task building a custom quad, than trying to design a small helicopter. We won't be equipping a helicopter with floats just yet. But it looks as though Zurich University have already sorted the safe return of a quadcopter to a helipad - much like the Deckfinder system - see below.
MARINER - This quite ordinary looking quad is actually a remarkable leap forward in technology, where the whole structure is a float, enabling landing and takeoff from water - and ditching of course - in the event that the unit runs out of power. A SeaVax Scout would need this safety feature for blue water endurance missions.
DP&A APRIL 2015 - NEW GUIDANCE TECHNOLOGY COULD MAKE DRONE SAFER
Researchers at the University of Zurich have unveiled new technology enabling drones to recover stable flight from any position and land autonomously in failure situations.
It will even be possible to launch drones by simply tossing them into the air like a baseball or recover stable flight after a system failure. Drones will be safer and smarter, with the ability to identify safe landing sites and land automatically when necessary.
Professor Davide Scaramuzza, co-inventor and director of the Robotics and Perception Group at the University of Zurich (UZH) is quoted as saying: “Our new technology allows safe operation of drones beyond the operator’s line of sight, which is crucial for commercial use of drones, such as parcel delivery.”
The growing popularity of drones has raised major safety concerns. Because they can run out of power, forcing them to land immediately, they must be able to detect safe landing spots and properly execute landing operations.
DECKFINDER - SCHIEBEL CAMCOPTER S-100 – COMPLETES SUCCESSFUL FLIGHT TESTS IN GPS DENIED ENVIRONMENT July 6, 2013 - Schiebel successfully concluded a series of flight trials with EADS Astrium’s Pseudolite-based Local Positioning System “DeckFinder”, expanding its automated launch and recovery capability for operations where access to GPS has been denied. Schiebel integrated the DeckFinder Receiver Segment into a S-100 and deployed the DeckFinder Ground Segment at the Schiebel Testing Grounds close to Vienna, Austria. “By feeding the position data generated by the Astrium DeckFinder System directly into the avionics of our CAMCOPTER® S-100, we are now able to operate fully automatically, independent from Global Positioning Systems (GPS) during hovering, approach and landing, enabling us to launch and recover in environments that no-one has been able to perform before”, Hans Georg Schiebel, Chairman of the Schiebel Group is quoted as saying.
DeckFinder is a Local Positioning System consisting of a ground segment of six Radio-Frequency-based Transmitters (Pseudolites) and a corresponding airborne receiver. Based on GPS-independent range measurements it provides the CAMCOPTER® avionics with highly accurate and relative 3D position information that allows the S-100 to navigate with an accuracy better than 20 cm over the landing zone, placing Schiebel’s customers in a unique position to operate the CAMCOPTER® with high degrees of autonomy during periods of GPS denial from small vessel decks under demanding environmental conditions - perfect for our marine quad application.
The Camcopter is a Vertical Takeoff and Landing (VTOL) UAV that needs no prepared area or supporting launch or recovery equipment. It operates day and night, under adverse weather conditions, with a beyond line-of-sight capability out to 200 km, both on land and at sea. The S-100 navigates via preprogrammed GPS waypoints or is operated with a pilot control unit. Missions are planned and controlled via a simple point-and-click graphical user interface. High definition payload imagery is transmitted to the control station in real time. Using “fly-by-wire” technology controlled by a triple-redundant flight computer. The machine is suitable for a wide range of payload/endurance combinations up to a service ceiling of 18,000 ft. In its standard configuration, the CAMCOPTER® S-100 carries a 75 lbs/34 kg payload up to 10 hours and is powered with AVGas or heavy fuel.
ROBOTICS & PERCEPTION GROUP - Prof. Dr. Davide Scaramuzza founded the Robotics and Perception Group at the University of Zurich in February 2012. The group consists of twelve researchers from the fields of mechanical, electrical, and informatics engineering. The group’s mission is to develop autonomous machines that can navigate independently using only onboard cameras.
Potential crash situations arise when drones temporarily lose their GPS position information, for instance, when flying close to buildings where a GPS signal may be lost. In such situations, it is essential that drones can rely on back-up systems and regain stable flight.
The UZH research group's drones are equipped with a single camera and acceleration sensors. Their orientation system emulates the human visual system and sense of balance. As soon as a toss or a failure situation is detected, computer-vision software analyses the images to identify distinctive landmarks in the environment and restore balance.
All image processing and control runs on a smartphone processor onboard the drone. This renders the drone safe and able to fulfil its mission without any communication or interaction with the operator.
Matthias Faessler, co-inventor of the technology and a researcher in Scaramuzza’s group is quoted as saying: “Our system works similarly to a tight-rope walker. When you balance on a rope, you fixate on some static points in the environment and shift your weight accordingly to restore balance.”
The same software builds a 3D model of the environment, which is used to group the terrain beneath the drone into “risky” and “safe” landing sites. If an emergency landing is required due to low battery or system failure, the drone will automatically detect and land on a flat, safe location without any human intervention.
BLUE BEAR & BRISTOL UNI - According to a Flight Global article, Blue Bear Systems and the University of Bristol have introduced a new concept that automates unmanned air vehicle (UAV) flight for use in challenging conditions. Dubbed Smart Boomerang, the system comprises two cameras and a mobile phone-derived computer that enables UAVs to learn a route and be able to automatically retrace its path. In certain conditions – such as when GPS is lost, when the UAV is indoors or where minimal operator control is required – Smart Boomerang would provide a retraceable route for the UAV so it could return safely to a base. Potentially, such a system could be adapted to return to a moving base. The principle behind the concept is designed to be adapted for the provision of high-resolution mapping for industry. Nuclear plant mapping is expected to be the first commercial application, resulting in the development of a product.
The system creates a “point cloud” of objects on the UAV’s route, and uses these to retrace it. Eventually an obstacle avoidance feature will be added to the system, although the team is focusing on the navigation side at the moment. Richard Bostock, project manager and technical lead for the programme at Blue Bear is quoted as saying: “On its first path it learns, and on its second it uses points identified to navigate.” “It’s all about time, money and risk,” “We’re trying to get the proof of concept for this technology at this point – we aren’t yet trying to create a product.” Interested parties included BP, EasyJet and the Sellafield nuclear site. EasyJet could potentially use such a system to monitor aircraft in a hangar to check for abnormalities, comparing data points against previously collected data on what configuration the aircraft should be in. The team has been working on Smart Boomerang for 12 months. Ref: Beth Stevenson
EL SEGUNDO,
CALIFORNIA 10 APRIL 2014 – Not strictly speaking a quadcopter (it's
an octocopter) and rather ungainly looking, but the above 'Black Knight
Transformer' from Advanced Tactics Inc. successfully completed the first flight test of
their modular (road) vehicle that is also a vertical takeoff and landing (VTOL) aircraft. Advanced Tactics is at the forefront of large scale multicopter design, production, and testing and the successful flights of the Black Knight Transformer open the door to a number of future aircraft designs that leverage Advanced Tactics’ patented and patent-pending technologies.
AMAZON
– DAILY MAIL APRIL 2015
- Amazon has won approval from U.S. federal regulators to test the latest version of its delivery drone outdoors, less than a month after the e-commerce powerhouse blasted regulators for being slow to approve commercial drone testing.
The aircraft can travel at more than 50mph and carry loads of up to 5 pounds.
About 86 percent of Amazon's deliveries are 5 pounds or less, the company
is quoted as saying.
MARCH
2015 - INDIAN NAVY TO BUY 50 SHIP BOURNE DRONES
The Navy is planning to acquire a total of 50 shipborne drones for intelligence, surveillance and reconnaissance missions as part of its effort to boost maritime security, says a report in PTI. "We want to have such a capability and want to know what kinds of products are available in the market," defence sources said.
SAAB SKELDAR - This marine UAV is being used by the Spanish Navy
At present, the Navy operates two squadrons of Israeli Heron and Searcher Mk-II UAVs which are based in Kochi and Porbandar.
The Naval force had recently issued a request for information (RFI) seeking details about naval shipborne unmanned aerial system (NSUAS). It feels that with such drones, the range of the machines can be increased.
Boeing firm Insitu, which has had preliminary conversations about the ScanEagle with India for a few years now, continues with the pitch. A prospective competition could include the Airbus Tanan and Textron Aerosonde as well.
The smaller UAVs launched from ships increases the vessels’ surveillance range. They also enhance the ship’s communication with other friendly vessels by relaying signals, especially from the Rukmani, the dedicated naval communications satellite. It is part of a larger intertwining communications network in a naval manoeuvre coordinating with other aircraft, ships and satellites.
FULL SIZE UNMANNED DRONES - NORTHROP GRUMMAN SCOUT
When the US Navy decided to withdraw its RQ-2 Pioneers from service, it looked for a second generation UAV. The Navy specified a vertical takeoff & landing (VTOL) aircraft, with a payload capacity of 90 kg (200 lb), a range of 125 miles (200 km), an endurance on station of three hours at an altitude of 20,000 feet (6,100 m), and the ability to land on a ship in a 46 km/h (29 mph) wind. The UAV was to fly 190 hours before planned maintenance. This went out to tender.
There were three finalists in the competition, which was designated "VTOL-UAV" or "VTUAV". Bell, Sikorsky, and a collaboration of Teledyne Ryan and Schweizer Aircraft submitted designs. The Ryan-Schweizer UAV was selected as the winner in the spring of 2000. The RQ-8A Fire Scout, as it was named, was a derivative of the Schweizer three-passenger,
turbine powered 330SP helicopter, with a new fuselage, new
fuel system, and UAV electronics and sensors.
DRONE NAVY HELICOPTER - A US Navy RQ-8A viewed from the front. A quad could be more efficient in terms of energy used, but not if using a complicated mechanical drive where gearing losses would be significant. Question: Why are there no floats on this machine?
Aeryon Scout is a small reconnaissance unmanned aerial vehicle (UAV) designed and built by Aeryon Labs of Waterloo, Ontario, Canada. The vehicle was developed between 2007 to 2009.
QUADCOPTER - The Aeryon Scout carries a heavier payload than most off-the-shelf quads, but has nowhere near the range or capacity that we are looking for, for our marine surveys. The electronic flight stabilization of these small units is more than capable of controlling a much bigger quad - and the design is very easy to upscale.
The Scout is controlled with a Tablet PC-based interface. This system differs from the customary method of joystick control in allowing users to operate the vehicle with minimal training. The Scout is piloted by pointing to an area on the map. Height is controlled using a scroll on the touch screen interface. The system operates using custom or commercially available map data in several formats including MrSID. Real-time maps can also be used during flight and the Scout can be flown real-time by the operator or pre-programmed to fly a series of
GPS waypoints. The Scout constantly monitors external conditions such as wind speed, as well as internal functions, such as battery level, allowing it to make an automated decisions en route to return home, land immediately or hover and wait.
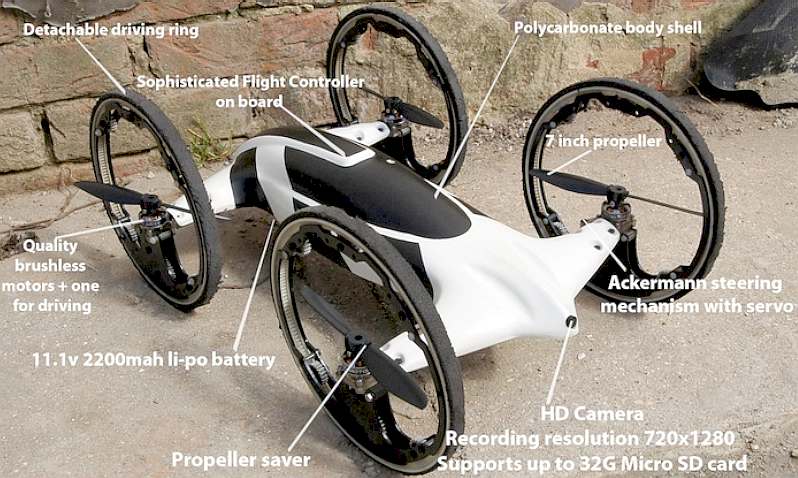
DAILY MAIL FLYING CAR, KICKSTARTER PROJECT, MAY 2013 - JUNE 2014
We have included this UAV here because it shows that if you put your mind to it, incredible things can be accomplished. It flying car may never be practical from an energy point of view, but it is possible. This car is a remote control toy that the inventor claims could change the way we travel. The car transforms into a quadcopter and apparently, there is a FULL SIZE version on the way. 427 backers pledged £122,366 in a Kickstarter launch to help bring this project to life with crowd funding.
As a possible future mode of transportation, it is one of most impressive hi-tech toys on the market. A British inventor, Witold Mielniczek of the University of Southampton says his invention could even be scaled up to create a full-sized car. 'B is a revolutionary new remote controlled hybrid car-helicopter with a patent pending design,' he says on the Kickstarter site set up to fund the project.
'It is capable of driving across difficult terrain using its large rear drive wheels and when the obstacles become too big, simply take-off and fly over them.'
Prototype cars have already been built, and are able to almost instantly swap from car to quadcopter. 'B is a toy that provides an extraordinary experience,' the site claims.
'B is virtually unstoppable, capable of transitioning between ground and air allowing the development of tricks otherwise impossible to achieve.'
In common with many other quads, the car also has an HD video camera to send back live footage of its travels - and (luckily for novice pilots) has been designed to survive major crashes.
'The combination of the design and material selection creates a solid construction that is capable of surviving the worst of landings,' the site says. 'When the vehicle crashes from high altitudes, the driving rings detach from the housing and can be easily put back together.
'The main chassis is made out of Polycarbonate, which is the same material used in protective goggles and bullet proof windows.'
'The body shell not only serves as a protective and decorative feature, it is also a structural element. 'The chassis when combined with the body shell not only forms a rigid and light construction that maintains its shape when flying or driving, but is also flexible enough to absorb excessive forces generated during crash landings.
'Therefore, you can push B to the limits even when your skills are not at the highest level. 'This makes B an excellent platform for all users ranging from newcomers to experts. ' Original article by Mark Prigg
CONVERTERWINGS MODEL A - Seen here during flight testing at Amityville, Long Island, New York March of 1956. This unique helicopter was intended to be the prototype for a line of much larger civil and military quad-rotor helicopters. The design featured two engines driving four rotors through a system of v belts. No tailrotor was needed and control was obtained by varying the thrust between rotors. Flown successfully many times in the mid-1950s, this helicopter proved the quad-rotor design and it was also the first four-rotor helicopter to demonstrate successful forward flight. Due to a lack of orders for commercial or military versions however, the project was terminated. Convertawings proposed a Model E that would have a maximum weight of 42,000 lb (19 t) with a payload of 10,900 lb (4.9 t) over 300 miles and at up to 173 mph (278 km/h). This aircraft is about the right size for the proposed SeaVax Scout UAV. But the SeaVax Scout would be electrically powered and charged in between flights from onboard solar and wind generated electricity - in true autobot fashion.
BEERLIFTERS COMPETITION - Hobby King RC store once again encouraged people to push the limits of what quadcopters and other multirotor remote control vehicles can do. They call it the beerlift and the goal is simple: build a multirotor craft capable of carrying the greatest amount of beer (or water, everything is measured by weight).
The competition is over, but the results were spectacular. The vehicle with the largest lift capacity – pictured above – was built by Olaf Frommann and carried 58.7 kilograms, or nearly 128 pounds to a hover a few feet off the ground. Last year the biggest lift was a mere 47 kg with an eight-rotor craft.
SKYSENSE, NOV 2014
Berlin-based startup
SkySense is looking to play a part, developing a landing pad that doubles as a wireless charging station and promises yet another layer of automation.
SKYSENSE
GERMAN OFFICE
HORIZON 2020
V959 BATTLESHIP, QUADCOPTER
The V959 Quadcopter (by WL Toys) is another small helicopter that is ideal to be able to test the usefulness of carrying an extended range drone aircraft onboard the SeaNet fleet as advance spotters of plastic floating islands and in the extreme, to capture video footage of potential pirates, or even harry such boarding parties, deploying deterrents if necessary. PlanetSolar used a camera fitted to a kite to capture interesting pictures while aloft; the concept is not new, but is underused.
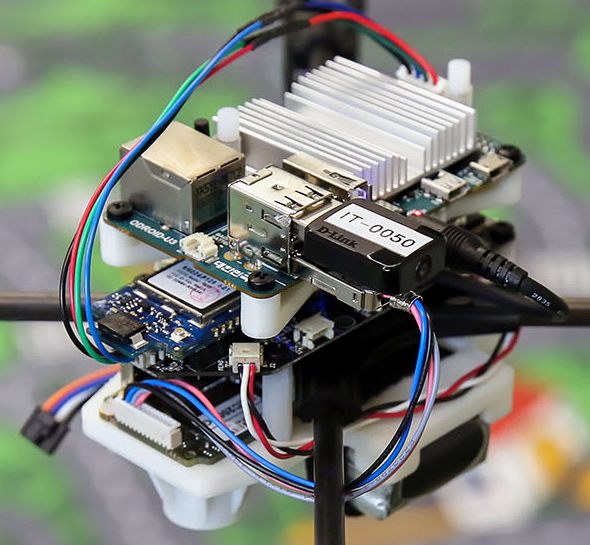
The V959 weighs in at approximately 97 grams with the stock 500 mah battery and slightly over 98 grams with a more powerful turnigy 600 mah power source (NE106118 600 mAh 1S 35-70c). This includes the camera, landing gear and microSD card – in other words, ready to fly!
MORE
ECONOMICAL UAV
CAMERA ACTION - The ability to take videos with a stock camera is probably the single biggest reason
for choosing this quad for test purposes. The camera along with it’s mount and microSD card
weigh about 10 grams, which is quite a bit lighter than the famous Keychain cams.
The camera slides into place from the rear of the aircraft and is removed in a similar fashion. The lens is hinged so that it can point anywhere from about straight (level) with the quadcopter to 45 degrees down, a feature which also provides an advantage over the Keychain Cams. The V959 Camera is powered by the quadcopter battery and the included 2G microSD card should hold about 18 minutes
of footage. A USB stick included in the package will transfer the (.avi) video files to your computer.
The camera can take still pics or videos.
The 'V959' drone also comes with a very basic quality camera, but this is just a feasibility study. It takes decent enough pictures to demonstrate the concept, but by comparison mobile phone cameras offer superior picture quality. The camera can be activated via the controller, but it offers very little in the way of control or feedback, such as may be needed for fleet observations during plastic patrols. This drone can be made to return to the flight deck of the Enterprise 1 by itself using off the shelf hobby equipment. Many RC model aircraft have this feature to prevent total loss of control, when, for example, a model flies out of radio range.
V959 Quadcopter Model Specifications and package: Overall Diameter 23.5cm, Height 9cm, Weight 82.9grams, 4-Ch 2.4G Remote controller, 100% assembled V959 w/ Spy Camera, Battery Charger + 3.7V 500mAh Li-Po Battery, Instruction Manual and 4 X extra rotor blades.
While the above RC sets take care of the UAVs, the Focus radio set above takes care of the SeaVax when in drone mode. For this we need a true 8 channel digital proportional RC set with six stick controls, two on a mixer. This crystal locked set cost under £100 with servos, only possible by making a hybrid from two sets. This combination rig has four stick levers and so allows us to perform some neat tricks. In combination with the 2.4 G UAV sets, it's ideal for putting this model of the robot ocean cleaner through its paces in remote control mode. We will though be looking to increase our radio power for multi-user displays - as in road shows.
LINKS
vafusa hydrocyclone separators Vortex depollution products shredders pet bottle perforator Marine Link Indian Navy Drones UAVs Gizmag Skysense pad charging drone lands SUAS
news
2014 worlds-largest-multirotor-makes-successful-maiden-flight Unmanned Systems Australia automated launch and recovery Meret Marine les-uav-deviennent-incontournables-pour-les-marines Maritime journal news onboard systems safety survival and-training life saving maritime rescue drone http://www.esa-bic.de/ http://www.anwendungszentrum.de/ http://www.copernicus-masters.com/ http://www.esnc.info/ http://www.maritimejournal.com/news101/onboard-systems/safety,-survival-and-training/life-saving-maritime-rescue-drone http://www.flightglobal.com/landingpage/Beth%20Stevenson.html http://www.uasvision.com/2014/09/26/blue-bear-furthers-uav-automation-research/ http://www.meretmarine.com/fr/content/les-uav-deviennent-incontournables-pour-les-marines http://www.unmannedsystemsaustralia.com.au/latestnews/?p=812 http://www.oceanfutures.org/ http://motherboard.vice.com/read/drones-would-revolutionize-whale-watching-if-they-werent-illegal http://www.dailymail.co.uk/sciencetech/article-3034058/Amazon-gets-ahead-test-delivery-drones-US.html https://www.kickstarter.com/projects/2017062404/b-go-beyond http://www.suasnews.com/2014/04/28563/worlds-largest-multirotor-makes-successful-maiden-flight/ http://www.mediadesk.uzh.ch/articles/2015/Drohnen_en.html http://www.dpaonthenet.net/article/91779/New-technology-could-make-drones-safer-and-smarter.aspx http://www.gizmag.com/skysense-pad-charging-drone-lands/34592/ http://www.faa.gov/ http://indiannavy.nic.in/ http://www.marinelink.com/news/indian-drones-borne386886.aspx http://en.wikipedia.org/wiki/Northrop_Grumman_MQ-8_Fire_Scout http://en.wikipedia.org/wiki/Aeryon_Scout http://www.forbes.com/ http://www.hydrocyclone.com/ http://en.wikipedia.org/wiki/Hydrocyclone https://www.vafusa.com/hydrocyclone-separators.htm
Youtube
ARCTIC - ATLANTIC - BALTIC - BERING - CARIBBEAN - CORAL - EAST CHINA - ENGLISH CH - GULF MEXICO GOM - INDIAN - MEDITERRANEAN - NORTH SEA - PACIFIC - PERSIAN GULF - SEA JAPAN - STH CHINA PLANKTON - PLASTIC OCEANS - RISING SEA LEVELS - UNEP
Our love affair with plastic is choking the oceans. Once people know about it, they want to stop it. But how? The next question is who? Obviously, if any of the researchers involved so far had come up with a solution, they would have sorted it years ago. We are a practical think-tank fresh to the issue and without a budget. We hope to be able to collaborate with other marine organisations that are funded for this work, or who have funds to investigate viable projects. You cannot donate to us directly on this site, but we hope to identify partner sites shortly where you can support a project much like that proposed herein, or better still, our own practical experiments. Volunteer APPRENTICE careers.
|
||||||||
|
This website is Copyright © 2016 Bluebird Marine Systems Ltd. The names Bluebird™, Bluefish™, Miss Ocean™, SeaNet™, SeaVax™ and the blue bird and fish in flight logos are trademarks. CONTACTS The color blue is a protected feature of the trademarks.
|